

现状以及优势
 组合导航系统是利用计算机和数据处理技术把具有不同特点的导航设备组合在一起,以达到优化的目的,整个系统由输入装置、数据处理和控制部分、输出装置以及外围设备组成。输入装置能够实时、连续的接收各种测量信息,由计算机将接收的信息进行综合处理,从而得到最优的结果以便于确定航向、航速、天文以及地文测算等,最后由输出装置例如显示器、打印机等对优化后的信息进行显示。组合导航系统最大的优势就是能够实现优势互补,提高导航系统的精度和可靠性。1
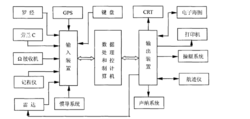
组合导航系统是利用计算机和数据处理技术把具有不同特点的导航设备组合在一起,以达到优化的目的,整个系统由输入装置、数据处理和控制部分、输出装置以及外围设备组成。输入装置能够实时、连续的接收各种测量信息,由计算机将接收的信息进行综合处理,从而得到最优的结果以便于确定航向、航速、天文以及地文测算等,最后由输出装置例如显示器、打印机等对优化后的信息进行显示。组合导航系统最大的优势就是能够实现优势互补,提高导航系统的精度和可靠性。1
关键技术从本质上看,组合导航系统是多传感器多源导航信息的集成优化融合系统,它的关键技术是信息的融合和处理2。新的数据处理方法,特别是卡尔曼滤波(见波形估计)方法的应用是产生组合导航的关键。卡尔曼滤波通过运动方程和测量方程,不仅考虑当前所测得的参量值,而且还充分利用过去测得的参量值,以后者为基础推测当前应有的参量值,而以前者为校正量进行修正,从而获得当前参量值的最佳估算。当有多种分系统参与组合时,就可利用状态矢量概念。通常,取误差本身作为状态矢量,不是对速度、方位本身等作出最佳估计,而是对速度误差、方位误差等作出最佳估计。把这一估算从实际测得的速度、方位中减去,就得到此时此刻的速度、方位等参量。组合导航实际上是以计算机为中心,将各个导航传感器送来的信息加以综合和最优化数学处理,然后进行综合显示。
海上组合导航海上组合导航系统大致可分为简易型和大型两类。简易型组合导航系统采用大规模集成电路、模块结构和微型计算机控制,其优点是结构紧凑、可靠、轻便、价廉。大型组合导航系统常以惯性导航为主,再由卫星导航、天文导航和各种无线电导航设备作为校准手段,也有以卫星导航为主,与奥米加、罗兰和其他高准确度近程定位系统组合的系统。大型组合导航系统常与自动舵和防撞设备结合而成自动航行系统。大型组合导航系统大量使用微型计算机,实行多机并行工作;采用模块结构和标准接口,可以任意组合和扩展;采用最小二乘法或卡尔曼滤波技术提高系统的准确度。
航空组合导航航空使用的组合导航系统种类很多。军用组合导航系统常以惯性导航为主,再与其他导航设备组合。民用组合导航系统常见的有伏尔导航系统、地美依导航系统、罗兰C导航系统、伏尔塔克导航系统、奥米加导航系统的组合。越洋飞行也用惯性导航与奥米加导航系统组合。
民航使用的新一代组合导航系统是飞行管理系统,把飞行姿态控制、飞行性能管理、导航、气象信息,数字仪表飞行和彩色屏幕显示等组合在一起,进行综合处理。
未来发展趋势组合导航系统的关键技术是信息的处理,而信息的筛选和处理更多的是依据知识库的丰富和完善,知识库包括两个方面:1、动态信息,包括雷达、GPS测量得到的实时位置信息以及其他船只、飞机的实时位置信息,2、静态信息,包括避让法规、港口自然情况、气候、水文、事故发生率等。将这些信息不断补充完整,能够建立完整的知识、专家系统,从而对信息的处理更加专业。
 扫码下载APP
扫码下载APP
 科普中国APP
科普中国APP
 科普中国
科普中国
 科普中国
科普中国