

研究历史
导弹制导系统是在综合利用自动控制理论,航空和惯性仪表,雷达、电子计算机、激光、红外和电视等技术的基础上发展起来的。1932年,美国火箭技术科学家R.H.戈达德首先使用陀螺仪和时间程序机构来稳定和控制一枚探空液体火箭。第二次世界大战期间,德国E.施泰因霍夫和T.布赫霍尔德设计的 V-2导弹的制导系统,是惯性制导系统的雏形。在此期间,德国和其他一些国家还研制过多种防空导弹的制导系统,虽然都没有达到实用阶段,但证明了导弹可用雷达波束导引。同时,研究了用于空空导弹和反坦克导弹上的光学瞄准的有线指令制导系统。战后,一些国家在此基础上又发展了各种类型的导弹制导系统。
组成导弹制导系统按功能可分三个部分:测量装置、计算装置、执行装置。1
测量装置用以测量导弹和目标的相对位置或速度(包括角度、角速度等)。攻击活动目标时,通常用雷达或可见光、红外、激光探测器;攻击地面固定目标时,用加速度表、陀螺仪等组成惯性测量装置,也有用电视或光学等测量仪器的。
计算装置用以将测量装置所测得的导弹和目标的位置和速度,按选定的导引规律加以计算处理,形成制导指令信号。
执行装置用以放大制导指令信号,并通过伺服机构驱动导弹舵面偏转或调整发动机推力方向,使导弹按制导指令的要求飞行,同时对导弹姿态进行稳定,消除外界干扰对导弹飞行的影响。
测量装置和计算装置两个部分可安装在导弹上,也可安装在地面或其他载体上。执行装置必须安装在导弹上。
分类按作战任务分类地(潜)地导弹制导系统
苏联从研制SS-3导弹的制导系统开始,经历了五个阶段,发展为第一代洲际弹道导弹SS-6的惯性制导系统。在美国,布赫霍尔德指导了“红石(Redstone)”地地弹道导弹制导系统的设计工作。W.S.霍伊塞曼和J.S.法里尔等以“红石”导弹为基础,研制成“丘辟特(Jupiter)”导弹的制导系统。20世纪60年代,霍伊塞曼又将此系统改造后用于“土星(Saturn)”运载火箭上。美国航空工程师C.S.德雷珀等在50年代设计了“雷神(Thor)”导弹的制导系统,以后又设计了“民兵(Minuteman)”洲际导弹的惯性制导系统。70年代,美国又研制成“战斧(Tomahawk)”巡航导弹所采用的惯性制导加地形匹配制导的复合制导系统。
防空导弹制导系统
50年代,出现了用雷达波束制导或无线电指令制导的舰空导弹、地空导弹。60年代以后,为适应防空导弹向多样化、系列化方向发展的需要,研制了多种新型的制导系统。如美国用于中低空防空的“霍克(Hawk)”导弹,采用了无线电半主动寻的制导;苏联SA-7便携式防空导弹,采用红外寻的制导,并采用导弹自旋、脉冲调宽的控制方法。70年代,由于激光技术的发展,出现用激光波束制导的瑞典RBS-70小型防空导弹。70年代后期,美国“爱国者(Patriot)”防空导弹采用复合制导,能同时制导数枚导弹对付多个来袭目标。
空空导弹制导系统
50年代,多数采用无线电雷达波束制导,有的采用红外寻的制导。限于当时的制导技术水平,载机只在尾追敌机时,才能发射导弹攻击对方,制导距离较近。60年代,美国“麻雀-Ⅲ(Sparrow-Ⅲ)”空空导弹,采用攻击范围较大的无线电半主动寻的制导系统。70年代,英国的“空中闪光(Sky Flash)”空空导弹,也采用这种制导系统,并增大了制导距离。美国采用红外寻的制导的“响尾蛇”空空导弹几经改进后,载机基本上可在各种方位上发射导弹攻击对方。
空地导弹制导系统
由于空地导弹的射程一般都在几十公里以上,因此,从50年代开始就采用复合制导,如当时苏联的AS-1空地导弹,飞行初段采用程序控制,中段采用无线电波束制导,末段采用半主动寻的制导。60年代,美国用于攻击地面雷达的“百舌鸟(Shrike)”空地导弹,由于攻击距离较近,采用全程无线电被动寻的制导。70年代,美国“小牛(Maverick)”空地导弹,采用几种类型的导引头,白天作战采用电视制导,夜间作战采用激光制导和红外成像制导。70年代后期,法国的“飞鱼(Exocet)”空舰导弹,飞行初段采用无线电高度表控制飞行高度,末段采用无线电主动寻的制导,能在距海面2~5米高度飞行,攻击军舰。
从50年代到60年代,苏联的“耐火箱(Sagger)”和美国的“陶(Tow)”反坦克导弹,都采用光学瞄准的有线指令制导系统。70年代,美国研制的“铜斑蛇(Copper-head)”反坦克炮弹,采用激光半主动寻的制导。
在中国,火箭专家钱学森于1954年著的《工程控制论》(第一版),奠定了中国前期的导弹制导系统研制的理论基础。1980年 5月,中国向太平洋海域发射洲际运载火箭成功,标志着中国的火箭制导技术进入新的阶段。同年10月,钱学森和宋健著的《工程控制论》(第二版),又充实和发展了导弹制导系统理论。
按制导方式分类导弹制导系统大致可分为四类:自主式制导系统、寻的制导系统、遥控制导系统、复合制导系统。
自主式制导系统
在制导过程中不需要提供目标的直接信息,也不需要导弹以外的设备配合,能自行操纵导弹飞向目标。主要用在攻击地面固定目标的导弹上。可采用几种制导方式,但主要是惯 性制导。惯性制导的优点是:不需要任何外界信息,就能自动地根据飞行时间、引力场的变化和导弹的初始状态,确定导弹瞬时的运动参数,因而不易受外界干扰。目前,大多数地地弹道导弹,如美国的“大力神(Titan)”“民兵”洲际弹道导弹等都采用惯性制导。随着制导技术的发展,还可采用天文或地形地图匹配的方式来提高制导精度。大部分地(潜)地导弹采用自主式制导系统。
性制导。惯性制导的优点是:不需要任何外界信息,就能自动地根据飞行时间、引力场的变化和导弹的初始状态,确定导弹瞬时的运动参数,因而不易受外界干扰。目前,大多数地地弹道导弹,如美国的“大力神(Titan)”“民兵”洲际弹道导弹等都采用惯性制导。随着制导技术的发展,还可采用天文或地形地图匹配的方式来提高制导精度。大部分地(潜)地导弹采用自主式制导系统。
寻的制导系统
其测量装置安装在导弹上,通常称导引头。能感受目标辐射或反射的无线电、热和光辐射波。根据测量到的目标和导弹的相对位置、速度等参数,在导弹上形成制导指令,操纵导弹飞向目标。其特点是制导精度较高,但制导距离不能太远。多数空空导弹和一部分地空导弹采用这种制导系统。寻的制导根据感受到目标信息的来源,可分为主动、半主动和被动式寻的等制导方式。
遥控制导系统
由导弹外的指挥站,测定导弹和目标的相对位置,并给导弹发出制导指令,通过导弹上控制装置操纵导弹飞向目标。最常见的是无线电指令制导,不少防空导弹如美国的“奈基-Ⅱ(Nike-Ⅱ)”,采用这种制导方式,其缺点是易被敌方发现和干扰。其他还有有线指令制导、无线电波束制导和激光波束制导等。遥控制导主要用于反坦克导弹、空地导弹、防空导弹、空空导弹和反弹道导弹导弹。
复合制导系统
导弹从发射到命中目标,一般分初始段、中间段、末段三个飞行阶段。导弹在飞行过程中,同一阶段或不同阶段采用两种以上制导方式的,称为复合制导系统。它的特点是可以根据战术和技术的要求来选择组合的内容。它可以分为三种:串行、并行以及串-并相结合。串行一般初制导段采用惯性制导,中制导采用遥控指令式,末制导段采用寻的制导。并行制导可以是无线电与光学两种手段同时进行的光电复合式制导。复合制导系统,可增大制导距离,提高制导精度和抗干扰能力以及抗隐身特性。现代某些防空导弹、岸(舰)舰导弹和反弹道导弹导弹等都采用复合制导系统。
导引规律导引导弹攻击目标时,导弹飞行路线应遵循的规律。当攻击活动目标时,通常有五种导引规律:
①“追踪法”。使导弹的速度方向总是对准目标(即图2中夹角β=0)。在导弹尾追目标和目标速度不大的情况下,此法简单而有效。但当导弹从侧面攻击目标或目标速度较大时,要求导弹能急速拐弯方能奏效。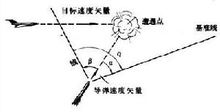
②“前置角法”。保持视线(导弹与目标的连线)与空间某固定基准的夹角(即图2中夹角q)为常值,使导弹始终按照与目标相遇的路线飞行。此法同猎人打驰兔相似。
③“比例导引法”。它包括以上两种方法,使导弹在目标机动时也能很好地实施攻击。以上三种导引规律,用寻的制导较易实现。
④“三点法”。在整个制导过程中,目标、导弹和指挥站三者始终保持在一条直线上。指挥站可以是固定的,也可以是活动的(如舰载、机载导弹设在载体上的指挥控制装置)。其缺点与“追踪法”一样,当目标速度较大时,导弹也要作较大的机动方能奏效。
⑤“位置前置点法”。导弹的位置要超前目标和指挥站的连线,形成一个角度。随着导弹与目标接近,此角逐渐减少,最后为零。这样可使导弹的飞行轨道比较平直,降低了对导弹机动性的要求,但要增加对目标的测量信息。后两种导引规律,用遥控制导较易实现。
使用弹道导弹攻击地面固定目标时,通常采用程序预定导引法。导弹发射后在主动段按一定程序拐弯,飞出大气层达到一定的速度和规定的弹道倾角时,发动机关机。此后,导弹开始被动段的自由飞行,最后进入大气层而命中目标。发动机关机时,导弹速度的大小和方向,是影响命中精度的重要参数,而制导系统的主要任务,就是使它们符合预定的要求。70年代以后发展的弹道导弹,也有的在主发动机关机后仍能控制导弹飞行,提高了制导精度。
此外,还可用现代控制理论的最优控制原理,求出导弹接近目标的最优飞行路线。由于所关心的指标不同,得出的最优飞行路线也不同。
制导精度由于制导系统不够完善而造成导弹命中目标误差的度量。它是评价导弹制导系统质量的主要指标之一。攻击活动目标的导弹,制导精度主要取决于测量装置的测量精度、计算装置的性能、导弹的机动能力等。当测量装置为雷达时,制导精度常受雷达测量的系统误差和闪烁噪声的影响,距离愈远,误差愈大。为此,可采用复合制导(如先遥控、后寻的制导)来提高制导精度。
80年代以来,采用红外寻的制导的导弹,其制导误差仅有几米甚至能直接命中目标。但制导距离一般较近,且在气候恶劣时不能应用。采用无线电寻的制导的导弹,制导误差约十几米。选择合适的导引规律,也能提高制导精度。不带末制导的弹道导弹,除因制导系统不完善引起的制导误差外,尚有发动机不能准时关机,再入飞行误差和瞄准目标误差等造成的非制导误差。采用惯性制导的导弹,加速度表误差和陀螺仪漂移是制导系统的主要误差源。当陀螺仪漂移率为0.02度/小时(在1g重力加速度作用下)时,对射程10000公里的弹道导弹,可达473米(公算值)。可采用追踪星光或其他方法来修正,以提高命中精度。目前,实用的陀螺仪漂移率已达0.002度/小时(在1g重力加速度作用下)。50年代后期,美国“大力神”洲际弹道导弹的圆公算偏差为3公里左右。70年代,美国“民兵-Ⅲ”洲际弹道导弹的圆公算偏差为320米左右。这两种导弹均采用惯性制导。80年代初,美国“三叉戟-Ⅱ(Trident-Ⅱ)”潜地弹道导弹,采用惯性加星光制导,圆公算偏差为400米左右。带地形匹配的“战斧”巡航导弹的圆公算偏差在100米以内。正在发展中的“高级惯性参考球制导系统”可使弹道导弹的制导精度进一步提高。
意义现代战争,从某种意义上说是科技水平的较量,武器的先进性虽然不能最终决定战争的胜负,但用高科技手段装备的精良武器在某个局部战争中确实能起到关键作用,任何人决不能忽视科技手段在现代化战争中发挥的越来越重要的作用。 与以往的战争相比,现代战争的突出特点是进攻武器的快速性、长距离、高空作战能力强。对于机动能力很强的空中目标或远在几百、几千公里的非机动目标,一般的武器是无能为力的,即使能够勉强予以攻击,其杀伤效果也十分差。要对付这种目标,需要提高攻击武器的射程、杀伤效率及攻击准确度,导弹就是一种能够满足这些要求的先进武器。 弹与普通武器的根本区别在于它具有制导系统。制 导系统的基本任务是确定导弹与目标的相对位置,操纵导弹飞行,在一定的准确度下,导引导弹沿预定的弹道飞向目标。导弹命中目标的概率主要取决于制导系统的工作,所以制导系统在整个导弹系统中占有极重要的地位。且随着科学技术的发展和相对导弹武器命中精度要求的提高,制导系统在整个导弹系统中的地位会越来越重要。
 扫码下载APP
扫码下载APP
 科普中国APP
科普中国APP
 科普中国
科普中国
 科普中国
科普中国