

振动陀螺仪特征
振动陀螺仪的主体是一个做高频振动的构件。同刚体转子陀螺仪相比,它没有高速旋转的转子和相应的支承系统,因而具有性能稳定、结构简单、可靠性高、承载能力大、体积小、重量轻和成本低等优点。1
振动陀螺仪种类音叉振动陀螺仪音叉振动陀螺仪又称音叉谐振陀螺仪。它利用音叉端部的振动质量被基座带动旋转时的哥氏效应来敏感角速度。从功能上看,它属于单轴速率陀螺仪。
音叉的双臂在激振装置的激励下做相向和相背交替的往复弯曲运动,音叉两端部的质量就做相向和相背交替的往复直线运动。激振装置保证了音叉做等幅振荡运动,双臂振荡的幅值相等,而相位恰好相反。
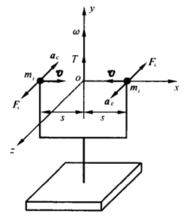
音叉振动陀螺仪的哥氏效应可以用下图来说明,由于相对运动和牵连运动的相互影响,音叉端部两个质点均具有哥氏加速度,并受到哥氏惯性力的作用。当音叉端部的质点做相向运动时,其哥氏加速度大小为 ,哥氏惯性力大小为
,哥氏惯性力大小为 ,方向如图中所示。
,方向如图中所示。
两个质点的哥氏惯性力矢量在xoz平面上,由此对音叉中心轴形成转矩,即哥氏惯性力矩,其大小为

其中s为音叉两端质点与y轴的垂直距离,方向如图中所示。
若音叉两端部的质点做相背运动时,则相对速度、哥氏速度、哥氏加速度、哥氏惯性力和哥氏惯性力矩都和图中的方向相反。
除了音叉端部两质点有上述现象外,音叉两臂上所有对称位置上的质点都会出现上述哥氏效应,所以整个音叉的哥氏惯性力矩应当通过积分来求得,通过积分输出的结果便可以反推出角速度信息。1
壳体振动陀螺仪壳体振动陀螺仪利用轴对称壳的振动质量在角速度作用下的哥氏效应而工作。在这种陀螺仪中,哥氏效应所导致的结果是振动波形相对基座的偏转。
壳体振动陀螺仪的核心部分是谐振壳体或称谐振子,利用谐振子振型相对基座的偏转来度量基座相对惯性空间的旋转。振型偏转方向与基座转动方向相反,振型偏转角度 与基座转动角度
与基座转动角度 成正比,即
成正比,即
 也即
也即
 其中
其中 为基座转动角速度。
为基座转动角速度。
谐振子振型的偏转通过哥氏加速度和哥氏惯性力从得到,也即通过谐振子在角速度作用下的哥氏效应得到相应的谐振子振型的偏转角度,由此便可以从壳体振动陀螺仪输出信息中反推出角速度信息。1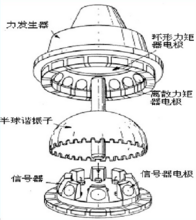
微机械振动陀螺仪微机械振动陀螺仪是固态的角速度传感器,以压电杯结构设计测量 coriolis 力.保证陀螺仪输出和角速度成正比的高精度电压信号。其一般测量范围 为0- 1500°/s ,单极或两极的输出电压可供选择使用。

振动陀螺仪与苍蝇的关系苍蝇虽小,但它的飞行本领却相当高超,可以垂直上升、下降,急速掉头飞行,定悬空中。
它的“特技飞行 ”在目前来说是任何飞机都做不到的,这不得不令人对它“刮目相看”。苍蝇有4只翅膀,在它前面的翅膀之后,还长着一对哑铃一样的小棒,这对小棒叫作楫翅,也叫平衡棒。它不但使苍蝇能直接起飞,而且是使苍蝇保持航向的导航器官。
苍蝇飞行时,楫翅以每秒钟330次的频率不停地振动。当苍蝇身体倾斜、俯仰或偏离航向时,楫翅振动频率的变化便被其基部的感受器所感觉。苍蝇的 “大脑”分析了这一偏离的信号后,便向有关部位的肌肉组织发出纠正指令,并校正身体姿态和航向。
根据苍蝇楫翅的导航原理,科学家们研制成功了一种新型振动陀螺仪。它的主要部件像只音叉,是通过一个中柱固定在基座上的。装在音叉两臂四周的电磁铁使音叉产生固定振幅和频率的振动,就像苍蝇振翅的振动那样。
当飞机、舰艇或火箭偏离正确航向时,音叉基座和中柱会发生旋转,中柱上的弹性杆就会将这一振动转变成一定的电信号,传给转向舵,使航向得以纠正。
由于这种振动陀螺仪没有高速旋转的转子,因而体积很小,可以装在一只茶杯里,但准确性却相当于比它大5倍的普通陀螺仪。
 扫码下载APP
扫码下载APP
 科普中国APP
科普中国APP
 科普中国
科普中国
 科普中国
科普中国