

天文导航
所谓自主导航技术是指不与外界进行信息的传输和交换,不依赖于地面设备的定位导航技术。天文导航是利用光学敏感器测得的天体(太阳、月球、地球、行星和恒星)的信息进行载体位置计算的一种定位导航方法。天文导航和惯性导航技术一样同属于自主导航技术。
天文导航是在航天、航海和航空领域正在得到广泛应用的自主定位导航技术。尤其对登月、载人航天和远洋航海是必不可少的关键技术,还是卫星和远程导弹和运载火箭、高空远程侦察机等的重要辅助导航手段。
天文导航特点有:
1,和惯性导航技术同属于自主导航技术
所谓自主导航技术是指不与外界进行信息的传输和交换,不依赖于地面设备的定位导航技术。天文导航是利用光学敏感器测得的天体(恒星、近天体)的信息进行载体位置的计算。天文导航和惯性导航技术一样同属于自主导航技术。
2,定位精度不很高,但误差不积累,其精度取决于光学敏感器的精度
相比其他导航方法来说,天文导航的精度不是最高的,但其不像惯性导航存在误差随时间积累的问题,这一点对长时间运行的载体来说是非常重要的。天文导航的定位精度主要取决于光学敏感器的精度。
3,不仅可以提供位置信息,还可以提供高精度的姿态信息
但天文导航也存在不足之处:在某些情况下受外界环境的影响—如气候条件;存在输出信息不连续的问题。
天文导航原理天文导航是以太阳、月球、行星和恒星等自然天体作为导航信标,以天体的地平坐标(方位或高度)作为观测量,进而确定测量点地理位置(或空间位置)及方位基准的技术和方法。
航空和航天的天文导航都是在航海天文导航基础上发展起来的。航空天文导航跟踪的天体主要是亮度较强的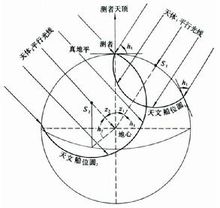 恒星。航天中则要用到亮度较弱的恒星或其他天体。以天体作为参考点,可确定飞行器在空中的真航向。使星体跟踪器中的望远镜自动对准天体方向,可以测出飞行器前进方向与天体方向(即望远镜轴线方向)之间的夹角,即航向角。由于天体在任一瞬间相对于南北子午线之间的夹角(即天体方位角)是已知的。这样,从天体方位角中减去航向角就得到飞行器的真航向。通过测量天体相对于飞行器参考面的高度就可以判定飞行器的位置。以地平坐标系在飞行器上测得某星体C的高度角h,由90°-h 可得天顶距z,以星下点(天体在地球上的投影点)为圆心,以天顶距z所对应的地球球面距离R为半径作一圆,称为等高圆。在这个圆上测得的天体高度角都是h。同时测量两个天体C1、C2,便得到两个等高圆。由这两个圆的交点得出飞行器的实际位置 M 和虚假位置M′。再用飞行器位置的先验信息或第三个等高圆来排除虚假位置,经计算机解算即得出飞行器所在的经、纬度(λ、φ)。1
恒星。航天中则要用到亮度较弱的恒星或其他天体。以天体作为参考点,可确定飞行器在空中的真航向。使星体跟踪器中的望远镜自动对准天体方向,可以测出飞行器前进方向与天体方向(即望远镜轴线方向)之间的夹角,即航向角。由于天体在任一瞬间相对于南北子午线之间的夹角(即天体方位角)是已知的。这样,从天体方位角中减去航向角就得到飞行器的真航向。通过测量天体相对于飞行器参考面的高度就可以判定飞行器的位置。以地平坐标系在飞行器上测得某星体C的高度角h,由90°-h 可得天顶距z,以星下点(天体在地球上的投影点)为圆心,以天顶距z所对应的地球球面距离R为半径作一圆,称为等高圆。在这个圆上测得的天体高度角都是h。同时测量两个天体C1、C2,便得到两个等高圆。由这两个圆的交点得出飞行器的实际位置 M 和虚假位置M′。再用飞行器位置的先验信息或第三个等高圆来排除虚假位置,经计算机解算即得出飞行器所在的经、纬度(λ、φ)。1
应用范围1,长时间运行的载体
航空:远程侦察机、运输机、轰炸机。
航天:卫星、飞船、空间站、深空探测、远程导弹。
航海:舰船、潜艇。
2,要求高导航定位精度的领域。
3,要求自主定位导航的领域。
天文导航系统的分类按照观测星体数目多少,天文导航分为单星导航和多星导航。单星导航也称为跟踪式导航,需要星跟踪器有伺服转台保持对星体的跟踪;多星导航也称星图匹配式导航,需要在星敏感器视场中观测到三个以上的星体。各星体之间的方位角差最好在60°~90°之间(越接近 90°越好),高度(俯仰角)最好在 15°~6°之间,星图匹配式导航的精度要优于跟踪式导航。
按照星体的峰值光谱和光谱范围分,天文导航可分为星光导航、射电天文导航。观测星体的可见光导航和红外导航叫星光导航,而接收天体辐射的射电信号进行导航的叫射电天文导航。
根据测星定位定向原理,天文导航可分为 3 种体系结构:
一是基于六分仪原理的天文导航系统,二战前,天文定位是主要的导航手段,许多舰船都配备了天文导航的各种仪表、天文钟和手持航海六分仪。二战后,出现了六分仪和潜望镜相结合的应用。
二是基于"高度差法"的天文导航系统,这种系统具有两个特点:
(1)导航过程中要依赖于惯导平台提供的水平基准。
(2)系统光学分辨率高,抑制背景噪声能力强,导航精度高。
三是基于星图识别的多星矢量定位技术的天文导航系统。该系统具有如下特点:(1)大视场光学系统。视场内平均三颗以上的星体被利用,这样可以提高系统捕获星体的概率和导航精度;(2)不需要任何外部信息,直接输出系统相对于惯性空间的姿态,因而能对陀螺误差进行直接校正;(3)确定运载体惯性姿态的精度是现有设备中最高的;(4)系统在大气层以内工作时,受天候影响较大,可靠性有待进一步提高。
按照安装平台划分,可分为海基、陆基、机载、弹载、天基 5 种应用平台。2
发展趋势随着微电子与计算机技术、光电探测技术的不断发展以及军事领域和太空探索的更高需求,天文导航技术今后的发展趋势是:
(1),发展多波段、小型、高精度、全自动、全天候光电天文导航系统。
(2),向自主导航方向发展,主要解决高精度水平基准问题。
(3),提高天文导航系统的导航数据输出率、可靠性和方便性。
(4),研制新型的红外波段(主要是0.85~3  波段)和毫米波光电探测器件,向高精度、多波段组合光电导航模式发展。
波段)和毫米波光电探测器件,向高精度、多波段组合光电导航模式发展。
(5),未来的天文定位系统的精度可能达到l角秒,定位精度达到30米,从而在激烈的战争环境下可替代GPS设备。
(6),未来几年,大视场光电天文导航系统主要朝以下几个方向发展:用APS传感器代替CCD传感器。APS的优势在于:提高了辐射阻抗、大的动态范围、独立的像素积分时间控制等。使用一片SOPC式微控制器和几块ASIC芯片(用FPGA技术实现)就能满足跟踪器对控制和处理电路的要求。这样,跟踪器的质量和大小就主要取决于光学部件,从而使整个系统的的成本大大减小而应用却进一步扩大。采用50_300的大视场和小焦距光学系统。3
 扫码下载APP
扫码下载APP
 科普中国APP
科普中国APP
 科普中国
科普中国
 科普中国
科普中国