

简介定义
系统是指确定的物理系统。例如飞机的自动驾驶系统、锅炉的水位调节系统等,它们都是完成预定的任务由一些物理部件组合起来的一个集合体。控制系统就是使用控制手段所实现的物理系统。
按照对系统的输入、输出关系,一个系统可以分为线性系统或非线性系统。如果一个系统的输入、输出满足叠加原理,该系统称为线性系统,否则为非线性系统。叠加原理包括叠加性及齐次性。例如,系统输入u,输出y的关系为y=Hu,如满足叠加原理:


其中u1、u2为任意两输入,a为任意实数。H是某一算子或函数,它按照系统的输入u唯一规定系统的输出y。1
类别线性系统又分为时变系统和时不变系统两类。如果系统的动态特性只与控制过程的时间间隔有关,而与具体的初始时刻和终止时刻无关,则该系统称为时不变系统,又称定常系统;如果系统的动态特性与控制系统的初始时刻及终止时刻有关,则该系统称为时变系统,也称非定常系统。 1
研究意义研究线性系统理论的重要性在于:线性系统理论是现代控制理论中最基础部分,也是最成熟的部分,它有完整的理论和设计、计算方法;线性系统理论在应用中起着较大的作用,大多数在正常运行范围内工作的系统,均能用线性模型来描述;线性系统理论是研究非线性系统理论的基础。1
控制理论的发展在控制理论的发展过程中,依据对控制系统描述的数学方法不同而形成两大类:经典控制理论及现代控制理论。经典控制理论是通过传递函数来表达系统的输入—输出关系的,主要的分析和综合方法是:频率响应法及根轨迹法,并且对单输入—单输出线性定常系统的分析和综合是有效的。该理论有两个局限性:第一,它只能描述单输入—单输出定常系统,难于处理多输入—多输出系统;第二,它只能表现系统输入—输出关系,而对系统内部结构不能提供任何信息,难以揭示系统更深刻的特性。客观上,现代控制系统要求有一种完善的控制理论,计算机技术的进步又为控制理论的发展创造了条件,于是产生了一种描述系统的新的数学方法——状态空间法。状态空间法是建立在状态变量概念上的,称为现代控制理论。
现代控制理论与经典控制理论比较,它适用范围广,可用于单输入—单输出系统或多输入—多输出系统,线性或非线性系统,时不变系统或时变系统。现代控制理论可以设计出最优控制规律,使系统的性能指标最佳。它是时域分析方法,对控制过程是直接的,也可以考虑任意初始条件。
现代控制理论从50年代中、后期开始发展,目前已形成了若干分支,其中主要有线性系统理论、最优控制理论、最佳估计理论、系统辨识、自适应控制及大系统理论等。
就线性系统理论来说,由于采用的数学工具和采用的系统描述的不同,又分成若干平行分支,如线性系统的状态空间法、线性系统的几何理论、线性系统的代数理论等。状态空间法是线性理论中一个最重要和影响最广的分支。1
线性系统的数学描述研究线性系统理论,首先要建立能反映实际物理系统特性的数学模型。由于所要解决的问题不同,所用的分析方法不同,描述同一系统的数学表达式也不相同。介绍描述控制系统的两种数学模型,即输入—输出描述和状态变量描述。通过等价变换,可改变系统动态方程的形式。
系统的输入—输出描述系统的输入—输出描述给出了系统的输入和输出的关系。
一、线性时变系统
设有多输入—多输出控制系统,如图所示。该系统有p个输入端,q个输出端。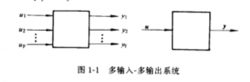
若系统的输入端和输出端均为1,即p=q=1,该系统称为单变量系统,否则称为多变量系统。
系统的输入—输出描述给出了系统的输入与输出之间的数学关系式,依据系统的输入与输出来推导这种描述时,无须知道系统内部结构。这种情况下,可把系统看作是一个"黑箱"。可以向黑箱施加各种类型的输入并测量相应的输出,从输入,输出数据中找出反映系统重要特性的规律。
利用脉冲函数的概念,容易求得系统的输入—输出关系。如图所示的脉动函数方程
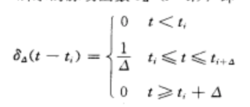
ti为某一特定时刻。当Δ趋于零时,δΔ(t-ti)的极限δΔ(t-ti)≌limδΔ(t-ti) 称为脉冲函数,或称Diracδ函数,简称δ函数。δ函数有以下性质:
(1)对于任何正的小数ε,有

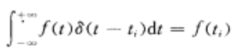
(2)对在ti连续的任何函数f(t),有
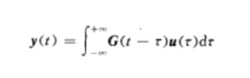
设单变量系统的输入—输出关系为y=Hu,用脉冲函数近似输入Hu,如图所示,输入“可闸一系列的脉动函数来近似,当Δ趋于零时,即

上式表明,系统的输出响应可以用脉冲响应函数和输入的卷积表示。
若系统是具有p个输入和q个输出的多输入—多输出系统,则式(1—1)可相应地推广为

G(t,τ)称为系统的脉冲响应矩阵。1
二、线性定常系统
单输入—单输出线性定常系统脉冲响应函数与具体的t、τ值无关,只与t-τ之差有关。于是输入—输出关系由式简化为
同理,多输入一多输出线性定常系统的脉冲响应矩阵为G(t-τ),输入一输出关系由式简化为
状态变量描述状态变量描述不仅能描述系统输入与输出之间的关系,而且在任意初始条件下,能揭示系统内部的行为,因此它是一种完全的描述,又称内部描述。
一个物理系统可以用不同的方法来描述,例如用高阶微分方程、传递函数、方框图、结构图等。
能完全表征系统时域行为的一组相互独立的变量,称为系统的状态。组成这个变量组的变量x1(t),x2(t)......xn(t)称为状态变量。
由状态变量构成的列向量称为系统的状态向量,也简称状态。以变量组的n个互相独立的状态变量x1(t),x2(t)......xn(t)作为坐标轴而构造出来的n维空间叫做状态空间。状态空间是状态向量取值的一个向量空间。系统某一时刻的状态是空间中的一个点,状态随时间的变化过程,构成了状态空间中的一条轨线。
描述系统输入、输出和状态向量之间关系的方程称为动态方程。对线性系统,其动态方程一般表示为
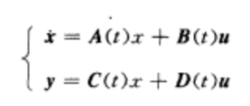
其中第一式是描述系统状态变化率的向量—矩阵微分方程,称为状态方程。第二式是描述系统输出与系统状态之间关系的方程,称做输出方程。u表示外部对系统的控制,称为输入向量。y是从外部量测系统运动状态的量,称为输出向量。若x,u,y是维数分别为n,r,m的列向量,则矩阵A(t),B(t),C(t),D(t)分别具有的相应阶数为n×n,n×r,m×n,m×r。它们的元素是时间t的连续函数。该式称为线性时变动态方程。A(t)称为系统矩阵,B(t)称为输入矩阵,C(t)为输出矩阵,D(t)为前馈矩阵。矩阵D(t)表示从输入u到输出y的直接传递部分,为分析简便,常令D(t)=n。状态变量x1(t),x2(t)......xn(t的个数n就是系统的维数。若方程中系数矩阵A,B,C,D不随时间变化,则方程为线性定常动态方程。1
 扫码下载APP
扫码下载APP
 科普中国APP
科普中国APP
 科普中国
科普中国
 科普中国
科普中国