

任务目标
“黎明号”任务的主要目标是利用探测器上同一套科学仪器先后对原行星灶神星和矮行星谷神星进行环绕探测。科学家通过深入分析“黎明号”收集的信息,判断落入地球的陨石与其母体的关系、目标天体的受热过程;通过表面图像了解其他天体对目标天体的撞击过程、目标天体的外壳构造和火山历史,分析其形成和演变过程。具体科学目标包括1:
研究灶神星和谷神星的内部结构、密度和同质性,这两颗互补的原行星一个是岩石质天体(灶神星),一个是冰质天体(谷神星);
利用三色近全球表面成像,确定灶神星和谷神星表面的形状和撞击坑;
通过无线电跟踪,确定灶神星和谷神星的质量、引力场、主轴、旋转轴和惯性力矩;
确定灶神星和谷神星的形状、尺寸、成分和质量;
确定灶神星和谷神星核心的受热过程和尺寸;
确定灶神星和谷神星的自旋轴;
了解水在控制小行星演变过程中的作用;
验证灶神星作为一系列石质陨石(古铜钙长无球粒陨石、钙长辉长岩陨石和奥长古铜无球粒陨石)母体的科学理论,确定源于谷神星的陨石;
提供古铜钙长无球粒陨石、钙长辉长岩陨石和奥长古铜无球粒陨石的地质背景;
通过0.25~5.0微米波长的绘图光谱仪获得表面覆盖度;
获得中子和伽马射线光谱,形成各天体表面元素成分图,包括主要造岩元素(氧、镁、铝、硅、钙、钛、铁)、微量元素(钆和钐)以及长寿命放射性元素(钍、铀)的丰度。
灶神星探测2011年5月3日,曙光号在距离灶神星1.21百万公里时拍摄了第一张照片,当中灶神星只有约5像素宽。曙光号进入接近灶神星的探测阶段,并于6月12日开始减速,准备在34天后进入环灶神星轨道。
2011年6月1日,曙光号距离灶神星48.3万公里时,为了导航需要拍摄了20张连续照片,分辨率已接近哈勃空间望远镜拍摄的灶神星照片。曙光号在抵达灶神星之前开始减速,每周发布更多照片。
美国宇航局证实曙光号在2011年7月16日进入环灶神星轨道,成为首个环绕小行星带小行星的探测器。曙光号确切入轨时间尚不清楚,这是由于当时天文学家只能估计灶神星质量与重力场,无法准确得知其数据。后来曙光号已进入轨道,便能反过来计算灶神星的质量与重力场。曙光号在7月17日06:30 UTC重新检测搭载的设备仪器。
曙光号在9月27日进入距离灶神星680公里的公转轨道,环绕一周的时间为12.3小时。曙光号后来在12月8日进入另一个公转轨道,距离灶神星只有210公里,环绕一周的时间为4.3小时。美国宇航局在2012年5月首度公开曙光号获得的灶神星初步数据,估计灶神星的金属核心直径为220公里。美国宇航局科学家进一步将灶神星视为独一无二的一种小行星,认为它是与岩石行星同时形成的大型小行星残存。
谷神星探测曙光号在2012年8月26日离开灶神星公转轨道,继续前往谷神星。该探测器预计于2015年抵达谷神星,比新视野号抵达冥王星还要早五个月,所以曙光号将成为首个近距离探测矮行星的探测器2。
2015年1月26日之后,从曙光号拍摄的谷神星图像超过哈勃空间望远镜的分辨率;而由新视野号拍摄冥王星图像在2015年5月15日超过了哈勃空间望远镜的分辨率。
仪器平台介绍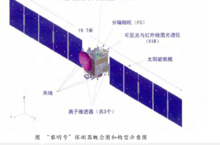 “曙光号”采用了一些在此前任务中经过验证的先进技术和商业现货(COTS),还使用了一部分以往探测任务的备用部件和仪器设备。探测器上的绝大多数系统都设有备份,以备主系统发生故障时使用,自动星上故障保护软件可检测出任何异常情况并尝试切换到备份设备。探测器如图所示1。
“曙光号”采用了一些在此前任务中经过验证的先进技术和商业现货(COTS),还使用了一部分以往探测任务的备用部件和仪器设备。探测器上的绝大多数系统都设有备份,以备主系统发生故障时使用,自动星上故障保护软件可检测出任何异常情况并尝试切换到备份设备。探测器如图所示1。
结构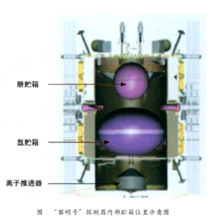 “曙光号”平台尺寸为1.64米×1.27米×1.77米,发射总质量为1217.7千克,结构核心为石墨复合材料制成的圆柱体,离子推进器的氙(425千克)贮箱和传统推力器的肼燃料(45.6千克)贮箱安装在圆柱体内部(图)。该圆柱体由铝制面板环绕而成,许多其他部件安装在这些面板上。探测器其他面板是由复合材料或铝制成。隔热毡、表面辐射器、涂层和加热器用于控制探测器的温度。
“曙光号”平台尺寸为1.64米×1.27米×1.77米,发射总质量为1217.7千克,结构核心为石墨复合材料制成的圆柱体,离子推进器的氙(425千克)贮箱和传统推力器的肼燃料(45.6千克)贮箱安装在圆柱体内部(图)。该圆柱体由铝制面板环绕而成,许多其他部件安装在这些面板上。探测器其他面板是由复合材料或铝制成。隔热毡、表面辐射器、涂层和加热器用于控制探测器的温度。
通信系统通信子系统通过3个低增益天线和1个直径1.52米的高增益天线实现与地球的通信,主要使“曙光号”探测器概念图和构型示意图用高增益天线进行通信,当探测器的高增益天线不指向地球时,才会启用低增益天线进行通信。每次只能使用1个天线。
姿态控制系统姿态控制系统负责确定探测器在太空中的方向或姿态,并控制姿态的保持和变化。姿态控制系统由2个星跟踪器、3个两轴惯性参考单元、16个太阳敏感器和4个反作用轮组成。该系统控制万向架以保持太阳帆板朝向太阳;另外,还通过控制离子推进器的万向架,使其能够在两轴方向移动。该系统通常使用星跟踪器来确定探测器的姿态。探测器的姿态通常由反作用轮控制,以保持或改变探测器的方向。不过,姿态也可能通过一组被称之为反应控制系统的12个0.9牛的肼推力器来保持和改变。“曙光号”探测器目前只用3个反作用轮来进行姿态控制,有1个反作用轮在2010年6月时报废。依靠3个反作用轮的构型也可以使“曙光号”完成其科学目标。但是,为了提高在另一个反作用轮出现异常情况下的灵活性,工程师也更新了探测器的软件,因此“曙光号”可以使用与推力器相结合的2个反作用轮来帮助控制姿态。
离子推进系统“曙光号”首次在太阳系内沿两个不同行星轨道执行飞行任务。“曙光号”的主推进系统——氙离子推进器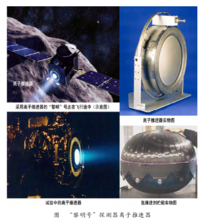 (图)由喷气推进实验室提供。美国曾在“深空”1号任务中验证过离子推进器,而“曙光号”任务则是NASA真正意义上第一次采用离子推进作为动力的科学探测任务。此前,欧洲“智慧”1号月球探测器和日本“隼鸟号”小行星探测器也曾成功使用过离子推进器。“曙光号”有3台长33厘米、直径30厘米、质量8.9千克的离子推进器,每台可经受数百次开关循环,均可在两轴方向上移动,以便在飞行过程中调整探测器的质心。姿态控制系统也可以使用离子推进器来帮助控制探测器的姿态。在整个任务期间,3台离子推进器在同一时间内最多有一台保持工作,总工作时间将超过2000天。离子推进器的工作原理(图)是向氙推进剂施加少量电荷形成氙离子,随后利用强大的电场加速,使离子束以14.5万千米/小时的速度喷射出去,从而产生推力。尽管离子推进器的推力较小,只有19~91毫牛,但这种推进器的燃料利用效率极高,氙推进剂在最大推力时的消耗速率只有3.25毫克
(图)由喷气推进实验室提供。美国曾在“深空”1号任务中验证过离子推进器,而“曙光号”任务则是NASA真正意义上第一次采用离子推进作为动力的科学探测任务。此前,欧洲“智慧”1号月球探测器和日本“隼鸟号”小行星探测器也曾成功使用过离子推进器。“曙光号”有3台长33厘米、直径30厘米、质量8.9千克的离子推进器,每台可经受数百次开关循环,均可在两轴方向上移动,以便在飞行过程中调整探测器的质心。姿态控制系统也可以使用离子推进器来帮助控制探测器的姿态。在整个任务期间,3台离子推进器在同一时间内最多有一台保持工作,总工作时间将超过2000天。离子推进器的工作原理(图)是向氙推进剂施加少量电荷形成氙离子,随后利用强大的电场加速,使离子束以14.5万千米/小时的速度喷射出去,从而产生推力。尽管离子推进器的推力较小,只有19~91毫牛,但这种推进器的燃料利用效率极高,氙推进剂在最大推力时的消耗速率只有3.25毫克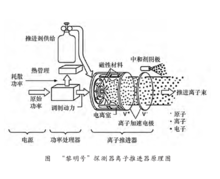 /秒。当“曙光号”到达谷神星时,离子推进器氙推进剂还剩余40千克,而工作时间已达1885天(远超“深空”1号的678天),提供的总速度变量与“德尔它”2运载火箭相当。
/秒。当“曙光号”到达谷神星时,离子推进器氙推进剂还剩余40千克,而工作时间已达1885天(远超“深空”1号的678天),提供的总速度变量与“德尔它”2运载火箭相当。
电源系统电源系统为所有星上系统提供电能,包括离子推进系统推进时。太阳能帆板处于折叠状态(即发射状态)时,“曙光号”探测器长2.36米;太阳能帆板展开后,探测器长为19.7米。每个太阳能帆板有18平方米,覆盖了5740片独立的光电池。2个太阳能帆板总计可产生10千瓦的电能,被安装在探测器的两边,万向接头可使其以任何角度朝向太阳。容量为35安培时的镍氢电池组能在探测器发射和太阳能帆板远离太阳时供电。
计算机系统“曙光号”的指令和数据处理系统可为探测器提供全面控制,并管理工程与科学数据的传输。该系统由冗余的RAD6000处理器组成,每个可提供8吉比特的存储容量。
科学仪器为了获得灶神星和谷神星的科学数据,“曙光号”携带了3台科学仪器。
分幅相机(FC)分幅相机
 (图)采用20毫米光圈,焦距为150毫米的f/7.9折射式光学系统。帧传递电荷耦合器件(CCD)焦平面1024×1024像素,视场为5.5°×5.5°。8方位滤波盘允许全色(畅通滤波器)和光谱可选成像(7个窄带滤波器)。最宽的滤波器成像范围是400~1050纳米。另外,分幅相机将在灶神星和谷神星的附近获得光学导航成像。分幅相机具有8吉比特的存储容量。相机可提供灶神星17米分辨率和谷神星66米分辨率的图像。因为分幅相机对于科学探测和导航是极其重要的,因此有2个完全相同的相机(FC1和FC2)互为备份,每个相机具有独立的光学系统、电子器件和结构。德国马克斯.普朗克太阳系研究所负责相机的设计和制造工作,参与机构还有德国航天局的行星研究所和不伦瑞克理工大学的计算机与通信网络工程研究所。
(图)采用20毫米光圈,焦距为150毫米的f/7.9折射式光学系统。帧传递电荷耦合器件(CCD)焦平面1024×1024像素,视场为5.5°×5.5°。8方位滤波盘允许全色(畅通滤波器)和光谱可选成像(7个窄带滤波器)。最宽的滤波器成像范围是400~1050纳米。另外,分幅相机将在灶神星和谷神星的附近获得光学导航成像。分幅相机具有8吉比特的存储容量。相机可提供灶神星17米分辨率和谷神星66米分辨率的图像。因为分幅相机对于科学探测和导航是极其重要的,因此有2个完全相同的相机(FC1和FC2)互为备份,每个相机具有独立的光学系统、电子器件和结构。德国马克斯.普朗克太阳系研究所负责相机的设计和制造工作,参与机构还有德国航天局的行星研究所和不伦瑞克理工大学的计算机与通信网络工程研究所。
伽马射线与中子探测器(GRaND)
伽马射线与中子探测器是以“月球勘测者”和“火星奥德赛”探测器上相似仪器为基础研制的,可用于测量灶神星和谷神星的元素组成。该仪器利用21台传感器,能够以宽视场测量天体反射或辐射的伽马射线和中子能量。伽马射线和中子可共同揭示天体表面下方1米处许多重要的原子成分。从灶神星和谷神星表面传出的伽马射线和中子能够帮助人们了解它们的元素组成。科学家认为,谷神星富含水物质,如果事实果真如此,仪器的数据中将反映出水的特征。与“曙光号”携带的其他仪器不同,该探测器没有内置数据存储系统。美国洛斯.阿拉莫斯国家实验室负责该仪器的研制。
可见光与红外绘图光谱仪(VIR)
可见光与红外绘图光谱仪(图7)是欧空局“罗塞塔”和“金星快车”上同类仪器的改进型。它也借鉴了NASA“卡西尼”土星轨道器上可见光与红外绘图光谱仪的技术。该仪器可用于测量灶神星和谷神星表面矿物质,光谱范围为256(空间)×432(光谱)。绘图光谱仪包含2个通道,CCD(可见光)视场范围为0.25~1.0微米,锑铬汞光电二极管阵列(红外)光谱范围为0.95~5.0微米。该仪器拍摄的每张图片能够在每个像元上记录400纳米波长范围的光照强度。通过与各种矿物样本的对比,科学家能够测定灶神星和谷神星表面的矿物质种类。该仪器内置容量为6吉比特的数据存储系统,其中2吉比特可作为冗余数据存储器。该仪器由意大利航天局提供,并由意大利国家天体物理研究所和伽利略航空公司联合制造。此外,科学家还利用“曙光号”的无线电发射机和灵敏的地基天线,进行额外的科学探测。通过“曙光号”传回的信息,探测两个目标天体引力场的微妙变化,揭示并分析其质量分布与内部结构。从事该研究的引力科学试验团队由喷气推进实验室的亚历克斯.卡诺普利夫领导。
 扫码下载APP
扫码下载APP
 科普中国APP
科普中国APP
 科普中国
科普中国
 科普中国
科普中国