

1自适应巡航控制系统是一种智能化的自动控制系统,它是在早已存在的巡航控制技术的基础上发展而来的。在车辆行驶过程中,安装在车辆前部的车距传感器(雷达)持续扫描车辆前方道路,同时轮速传感器采集车速信号。
当与前车之间的距离过小时,ACC控制单元可以通过与制动防抱死系统、发动机控制系统协调动作,使车轮适当制动,并使发动机的输出功率下降,以使车辆与前方车辆始终保持安全距离。
定义自适应巡航也可称为主动巡航,类似于传统的定速巡航控制,该系统包括雷达传感器、数字信号处理器和控制模块。在自适应巡航系统中,系统利用低功率雷达或红外线光束得到前车的确切位置,如果发现前车减速或监测到新目标,系统就会发送执行信号给发动机或制动系统来降低车速,从而使车辆和前车保持一个安全的行驶距离。当前方道路障碍清除后又会加速恢复到设定的车速,雷达系统会自动监测下一个目标。主动巡航控制系统代替司机控制车速,避免了频繁取消和设定巡航控制。自适应巡航系统适合于多种路况,为驾驶者提供了一种更轻松的驾驶方式。2
自适应巡航控制(ACC)是一个允许车辆巡航控制系统通过调整速度以适应交通状况的汽车功能。安装在车辆前方的雷达用于检测在本车前进道路上是否存在速度更慢的车辆。若存在速度更慢的车辆,ACC系统会降低车速并控制与前方车辆的间隙或时间间隙。若系统检测到前方车辆并不在本车行驶道路上时将加快本车速度使之回到之前所设定的速度。此操作实现了在无司机干预下的自主减速或加速。ACC控制车速的主要方式是通过发动机油门控制和适当的制动。
特点自适应巡航控制系统的最大优点在于不仅能够保持驾驶人预先设定的车速,还能够在特定驾驶条件下随时根据需要降低车速,甚至自动制动。
当车速超过30公里/小时,无论驾驶人正以何种方式驾驶车辆,自适应巡航控制系统均会介入工作,以使车辆始终保持驾驶人预先设定的车速。为此,系统要么自动提高发动机动力,要么降低发动机动力并使变速器降档,以利用发动机制动降低车速。在某些情况下(例如下坡行驶或拖车时),如果上述措施不足以使车速降低到预定值,系统还将使制动系统进行干预。3
作用(1)通过车距传感器的反馈信号,ACC控制单元可以根据靠近车辆物体的移动速度判断道路情况,并控制车辆的行驶状态;通过反馈式加速踏板感知的驾驶者施加在踏板上的力,ACC控制单元可以决定是否执行巡航控制,以减轻驾驶者的疲劳。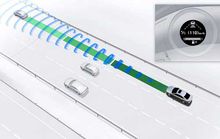
(2)自适应巡航控制系统一般在车速大于25 km/h时才会起作用,而当车速降低到25 km/h以下时,就需要驾驶者进行人工控制。通过系统软件的升级,自适应巡航控制系统可以实现“停车/起步”功能,以应对在城市中行驶时频繁的停车和起步情况。
本词条内容贡献者为:
刘军 - 副研究员 - 中国科学院工程热物理研究所
 扫码下载APP
扫码下载APP
 科普中国APP
科普中国APP
 科普中国
科普中国
 科普中国
科普中国