

激光测距仪的发展现状
激光技术一出现,就在军事应用方面发挥了巨大作用。激光测距机就是激光技术在军事领域应用的成功典范。脉冲激光测距机作为军用装备器材,发展于60年代初,经过40多年的开发、研制和装备,己经广泛应用于各种应用领域与测距领域。由于其具有良好的方向性和单色性,所以与微波等其它测距方法相比,激光测距具有方向性好、测距精度高、测程远、抗干扰能力强、隐蔽性好等优点,因此在军事领域得到了广泛应用。作为现代军事侦察技术和距离探测设备的重要技术之一,脉冲激光测距技术对提高防空、海上作战、中近程精确打击及陆上武器攻击的命中精度方面己起到了关键作用,未来武器系统的发展及其命中精度的提高将在很大程度上依赖于激光测距技术的发展。
对距离进行测量,是军事中重要研究项目,因为射击、大炮、侦察等都需要精确的距离数据。激光的出现,使各种军用激光测距仪相继发展起来。事实也证明,激光测距与大炮、坦克相结合构成的火控系统,大大提高了首发命中率,己成为军队必备的武装装备,被誉为常规武器的威力倍增器。
其中,脉冲激光测距以其峰值功率高、探测距离远、测距精度高、对光源相干性要求低等优点在工业、航空航天、大地测量、建筑测量和机器人等领域获得了广泛应用。不同的应用对测量范围与精度有不同的要求,在军事上,测量范围从几百米到几十千米,相应的精度要求从几十厘米到几百米;而在航空航天方面,从航天器间的对接到飞船的着陆,精度要求在毫米量级。
激光测距的优点:高激光测距的精度与操作者的经验和被测距离无关,误差取决于仪器的精度。战术激光测距仪的误差在厘米以内,科学实验的测距仪精度更高(有合作目标),最好的测距纪录是384401km,误差仅10cm。用激光测距对卫星进行精密测轨,精度达1cm。口本用于预防地震的长距离监测系统,全程84km误差小于1mm,测距仪体积小重量轻,己装备的激光测距仪重量一般为10kg左右,最小只有0.36kg,体积只有香烟盒那么大。激光由于方向性好,所以可以不用巨大的天线就可以发射极窄的光束。如束散角为1/20mrad的激光束,只需直径7.62cm的光学天线;而对微波来说要想得到同样的束散角,其天线直径需305m以上。
激光分辨率高,抗干扰能力强,窄的光束和短的脉冲宽度,不仅使微波的横向和纵向目标分辨率大大提高,而且不受电磁干扰和地波干扰。例如在导弹的初始段微波测距由于严重的地波干扰而不能使用,激光却得心应手。
测距法激光测距按测距原理区分,大体有如下三类:
(1)脉冲测距法,这种脉冲测距的精度大都为米的量级,是用于军事及工程测量中精度要求不高的场合使用。
(2)相位测距法,通过测量单色连续激光的调制波在待测距离上往返传播所发生的相位变化,间接测量时间,达到距离测量目的。这种方法测量精度高,通常在毫米量级,因而在大地、工程和体育测量中得到了广泛应用。
(3)干涉测距法,它也是一种相位法测距,但不是通过测量激光调制信号的相位来测定距离,而是通过测量激光光波本身的干涉条纹变化来测定距离,所以距离分辨率可达到半个激光波长,通常达到微米量级。
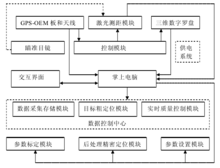
整体结构测距定位系统是由GPS定位模块、激光测距模块、三维数字罗盘、供电系统、掌上电脑、数据控制中心(含实时质量控制模块、数据获取存储模块、目标粗定位模块等)等模块构成。系统中,GPS模块可以实时测定流动点的位置并提供测量时间,为系统提供WGS84大地测量基准和时间基准;激光测距模块获取流动点至目标点间的斜距;三维数字罗盘提供系统的姿态;供电系统提供各模块的正常工作用电接口及外接电源串口,保证各模块的正常稳定工作;掌上电脑用于存储接收到的数据并发出有关命令;数据控制中心实现数据的综合处理及用户界面的可视化操作。
工作流程定位模式1)作业人员手持GPS激光测距系统从目镜瞄准待定位目标,按下测距按钮,交互式界面实时显示流动点位置、目标到流动点的距离、视线姿态和目标粗略位置信息。
2)作业人员移动一段距离,从下一个方位瞄准目标测距,交互界面除显示流动点位置、目标到流动点的距离、视线姿态和目标粗略位置信息外,还将实时显示状态信息。当状态正常时,显示上次与本次观测数据综合计算的目标位置信息;当状态异常时,显示上次的目标定位信息。
3)作业人员继续移动一段距离,从另一个方位瞄准目标测距。当状态正常时,显示的目标位置一般较前次准确。
4)作业人员继续移动瞄准目标,获取5-8个状态正常的GPS卫星观测数据、测距数据、姿态数据和状态数据。外业工作结束。
5)导入GPS基准站数据进行数据处理,精确解算目标的三维坐标。
技术路线测距定位系统实时定位的技术:第一步,外业测量,采集GPS数据、三维数字罗盘数据和激光数据,并将这些数据存储于激光测距仪中;第二步,利用单点定位算法对测站点坐标进行解算,给出测站点的三维坐标,并在界面上显示坐标信息;第三步,对数据进行实时质量控制,初步剔除粗差及无效的观测量;第四步,联合GPS数据、三维数字罗盘数据和激光数据共同解算目标点坐标,在界面上显示目标点粗略的三维坐标。1
 扫码下载APP
扫码下载APP
 科普中国APP
科普中国APP
 科普中国
科普中国
 科普中国
科普中国