

不同重力测量方法
传统的地面静态重力测量技术尽管能够获取地球重力场的高频信息,但受地形等客观因素制约,不仅效率低下,而且只能局限于陆地上的部分地区。
船载重力测量技术作为一种动态重力测量方法,是近20多年来采集海洋局部重力数据的主要手段,其特点是因载体运动速度低且行驶在一个平均海面上,仅靠测量系统硬件方面的阻尼和合适的低通滤波技术,便可达到所要求的精度,然而正因其速度慢且只能限于海面作业,仍是一种低效的重力测量方法。
航空重力测量是以飞机为载体,综合应用重力仪(或加速度计)、INS、GPS和测高、测姿设备测定近地空中重力加速度的重力测量技术。与地面重力测量相比,航空重力测量不仅快速经济,而且能够在一些难以开展地面重力测量的特殊区域如沙漠、冰川、沼泽、高山、森林等进行作业。由于航空重力测量大体上是利用两种观测量的时间序列之差值来确定重力场信息,因此它是一种适宜采用频谱分析的方法1。
传统的地面静态重力测量方法能够获取地球重力场的高频信息,但受地形等客观因素制约,不仅效率低,而且只能局限于陆地上的部分地区。船载重力测量是采集海洋重力数据的主要方法,其特点是因载体运动速度低而且行驶在一个平均海面上,因此仅靠测量系统硬件方面的阻尼和合适的低通滤波技术,便可达到所要求的精度,但只能限于海面作业。尽管卫星重力测量技术能够测定全球重力场,但其仍只能测定地球重力场的中长波分量,测定高频重力场信息,仍需依赖于传统的重力测量技术2。
航空重力测量基本原理原理上,重力是利用加速度计测得的。典型的加速度计通常包括试验质点、弹性约束物(如弹簧)和外壳等部分。试验质点由约束物支撑,只能沿着某一敏感轴方向运动,当受到加速度时,相对其平衡位置产生位移。加速度计的输出是一组电信号,其大小与位移成正比。根据牛顿第二定律,试验质点在惯性参考系(i)中的运动方程为: ,式中,
,式中, 为比力矢量,即加速度计的观测量,
为比力矢量,即加速度计的观测量, 为试验质点在惯性坐标系中的位置矢量,
为试验质点在惯性坐标系中的位置矢量, 为引力加速度矢量1。
为引力加速度矢量1。
原理上航空重力测量需要解决两个基本问题:1.运动状态下,在空中如何维持传感器的稳定指向?2.如何分离引力加速度和惯性加速度?
关于第一个问题,大概有四种不同的解决方案,其中三种采用惯性传感器进行姿态稳定,一种采用GPS多天线系统。
关于第二个问题,有两种不同的解决途径。一是采用两个不同的加速度测量系统,其中一个的输出中含有引力加速度,而另一个不含,于是在同一坐标系中对两组加速度输出求差,即可消去共同的载体运动加速度,剩下的差值中就是引力加速度和系统误差的影响。如果仅要求测定垂直加速度,可采用气压测高仪或激光测高仪(海面、大型湖面上)代替其中的GPS。第二种分离方法是通过共用基线的两个加速度计的输出值求差,以消去载体运动的影响。如果共用基线是旋转稳定的,由差值读数可以获得重力梯度分量,这就是重力梯度测量的基本原理1。
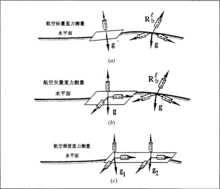
航空重力测量系统航空重力测量系统通常应当包括如下三个部分,即用于测量比力的加速度计(或重力仪,称之为重力传感器分系统)、使加速度计保持水平的系统(或计算其姿态,称为平台分系统)和测量飞机惯性加速度的定位分系统2。为便于表述,习惯上按照航空重力测量的复杂程度,将航空重力测量分为航空标量重力测量、航空矢量重力测量和航空梯度重力测量三类。
航空标量重力测量仅确定重力异常矢量的大小。依据所使用的重力传感器和平台分系统的不同,分为平台式、捷联式和旋转不变式。平台式是将精密加速度计安装到稳定平台上,定向由稳定平台维持,引力加速度与惯性加速度的分离采用求差方法。捷联式系统采用数学平台,垂直加速度计是主要重力传感器,引力加速度与惯性加速度的分离仍采用求差方法。旋转不变式系统采用三轴加速度计,理论上不存在定向问题,而是利用三个加速度计的输出计算重力的大小。
航空矢量重力测量同时确定重力异常矢量的大小和方向,分为平台式和捷联式,其原理与标量类似。
航空梯度重力测量是利用同一稳定平台上的两组三轴加速度计测定异常位的二阶梯度,因此空中定向由稳定平台维持1。
航空重力测量研究现状及发展航空重力测量技术的发展是伴随着其三个主要组成部分的发展而发展的。在1990年以前,由于受限于所用设备的精度,航空重力测量并未取得实质性成果;在此之后,随着动态差分GPS(DGPS)技术的成功应用,航空重力测量的成功试验遂成现实。进入二十世纪九十年代以来,标量重力测量系统的发展主要涵盖以下六个方面:
传统航空重力测量系统的改进传统航空重力测量系统采用改进后的船载重力仪(如LaCoste&Romberg、Bell重力仪),现已比较成熟,并作为一种标准方法用来获取中、高分辨率重力信息(即半波长大于5km)。由于软件和硬件的改进,自二十世纪九十年代中期,这种系统的精度已由5mGal(10km的半波长)提高到约2mGal(半波长为6km),甚至达到1mGal(半波长为5km)。
新型系统方案的研究近十年来,基于惯性技术和DGPS组合的新型系统方案的研究取得了进展。莫斯科惯性技术中心(ITC)、加拿大卡尔加里大学和卡尔加里Canagrva公司合作首次对惯性稳定平台系统进行了试验,并由ITC以航空的方式进行了作业。类似于该系统,Sander地球物理公司于1999年完成了另一个名为AIRGrav系统的研制。这些系统均提供于商业用途,而且表明可获得0.5一1.5mGal的中、高频的重力场估值。
从DGPS中导出加速度的理论和方法至二十世纪九十年代中期,人们普遍认为,在良好的环境条件下,对于905滤波周期,利用DGPS可以1一2mGal的精度导出运动平台的加速度。尽管如此,若欲同时提高精度和加大系统的带宽,则在与航空重力相关的频带上,由DGPS引起的误差仍是研究的主要障碍,况且,良好的环境条件实际上往往难以得到保证。因此,在确定加速度时,需要对DGPS误差所造成的影响做更详细的研究,并寻求更好的模型和方法解决系统的带宽问题。
滤波和估算方法当航空重力系统的频带加宽时,要在消除传感器和动态条件下引起的噪声的同时,保持幅度较小的完整重力信号是困难的。当信噪比很低及处理与飞机运动相关的噪声时,需要高级的滤波技术和估算方法。
向下延拓方法研究航空重力测量得到的是航线高度上的扰动重力或重力异常。对大地测量领域的许多应用来说,通常要将其格网化并归算到地面或大地水准面上,然后才能依照物理大地测量边值问题的方法推求大地水准面高及其它扰动重力场元。空中重力异常向下延拓的基本方法是求解Poisson积分方程,称为逆Poisson方法。
航空重力数据的应用研究一些国家和国际的研究项目或工程项目中均含有航空重力测量系统,其目的是利用航空重力数据估算大地水准面,以满足测图或勘探需要。NRL在其航空地球物理工程中的目标是获取大面积的、中等分辨率的航空重力测量数据。迄今已在格林兰岛、南极洲西部和北极地区成功地进行了大规模的航空重力测量。利用这些数据确定的近海区域的相对大地水准面的精度为3一5cm,空间分辨率约为IOkm,相应的绝对大地水准面的精度约为10cm1。
 扫码下载APP
扫码下载APP
 科普中国APP
科普中国APP
 科普中国
科普中国
 科普中国
科普中国