

水声定位技术简介
自从1912年在美国出现了第一台水声测深仪以后,开始有了水声助航设备。二战中,对水下目标的探测和测量受到了重视,并在战后得到了迅速的发展。1958年,美国华盛顿大学应用物理实验室在达波湾建成了三维坐标跟踪水下武器靶场。这种水下定位跟踪技术在六十年代后期得到广泛应用,成为鱼雷靶场的主要测试方法。迄今为止,国内外水下武器靶场使用的水下定位跟踪系统有多种类型,按其安装方式可分为固定式跟踪系统、活动式(船载)跟踪系统和轻便式跟踪系统。固定式跟踪系统的水下测量设备大多数固定在海底,其范围大、费用高,只能在固定海区使用;活动式跟踪系统的全部设备都固定安装在活动平台上,试验时随活动平台开往试验海区;轻便式跟踪系统的体积和重量相对较小,可以随时布放和回收,并可通过飞机、车辆和船只从一个试验区运送到另一个试验区。这三种水下定位跟踪系统虽然在结构上有较大差别,但在原理上均是依赖于几何原理的水声学定位方法。根据接收基阵的基线可以将水声定位技术分为三类:长基线(LongBase-Line)、短基线(Short Base-Line)、超短基线(Ultra Short Base-Line)。
长基线水声定位系统的基阵长度在几公里到几十公里的量级,利用测量水下目标声源到各个基元间的距离确定目标的位置。短基线水声定位系统的基阵长度一般在几米到几十米的量级,利用目标发出的信号到达接收阵各个基元的时间差,解算目标的方位和距离。超短基线定位系统的基阵长度一般在几个厘米到几十厘米的量级,它与前两种不同,利用各个基元接收信号间的相位差来解算目标的方位和距离。
若按照工作方式来划分,以上三种定位系统都可以选择使用同步信标工作方式或应答器工作方式。采用同步信标工作方式,要求在待测目标或测量船上都安装高精度同步时钟系统,信标按规定的时刻定时发射信号,并据此确定目标位置。应答器工作方式要求在应答和测量船上都安装询问(应答)发射机和接收机。
通常所说的水声定位系统所测得的目标位置结合起来进行坐标变换,就能得到水下目标在大地几何坐标中的位置或轨迹。坐标,都是相对于某一参照物的位置而言。这个参照物有时就是基阵的载体(通常相对坐标系的某一个轴线和舰船的艏艉线重合),它并不真正给出目标的大地几何坐标位置。然而水声定位系统和其他的导航系统(如近年来获得广泛应用的卫星导航定位系统)结合起来进行坐标变换,就能得到水下目标在大地几何坐标中的位置或轨迹。1
水声定位系统迄今为止,水下目标定位跟踪的主要手段仍是依赖于几何原理的水声学定位方法。通常用声基线的距离或激发的声学单元的距离来对声学定位系统进行分类。水声定位系统,根据所实施的原理和测量手段不同,又可分为“方位--方位”、“方位--距离”和“距离--距离”三种测量系统。大部分的长基线、短基线系统都属于后者。距离测量水声定位系统是通过测量水下声源所辐射的声信号从发射到接收所经历的时间及声速来确定声源到各接收点的距离,从而实现对目标进行定位的。
超短基线定位系统如图1所示,超短基线定位系统的所有声单元(三个以上),集中安装在一个换能器中,组成声基阵,声单元之问的相互位置精确测定,组成声基阵坐标系,声基阵坐标系与船的坐系之间的关系要在安装时精确测定,包括位置(X、Y、Z偏差)和姿态(声基阵的安装偏差角度:横摇、纵摇和水平旋转)。系统通过测定声单元的相位差来确定换能器到目标的方位(垂直和水平角度);换能器与目标的距离通过测定声波传播的时间,再用声速剖面修正波束线确定距离。以上参数的测定中,垂直角和距离的测定受声速的影响特别大,其中垂直角的测量尤为重要,直接影响定位精度,所以多数超短基线定位系统建议在应答器中安装深度传感器,借以提高垂直角的测量精度。超短基线定位系统要测量目标的绝对位置(地理坐标),必须知道声基阵的位置、姿态以及船舷向,这可以由GPS,运动传感器和电罗经提供。系统的工作方式是距离和角度测量(range/angle)。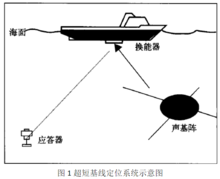
超短基线的优点:低价的集成系统、操作简便容易;只需一个换能器,安装方便;高精度的测距精度。超短基线的缺点:系统安装后的校准需要非常准确,而这往往难以达到;测量目标的绝对位置精度依赖于外围设备精度一一电罗经、姿态传感器和深度传感器。1
短基线定位系统如图2所示,短基线定位系统由3个以上换能器组成,换能器的阵形为三角形或四边形,组成声基阵。换能器之间的距离一般超过10m,换能器之间的相互关系精确测定,组成声基阵坐标系,基阵坐标系与船坐标系的相互关系由常规测量方法确定。短基线系统的测量方式是由一个换能器发射,所有换能器接收,得到一个斜距观测值和不同于这个观测值的多个斜距值,系统根据基阵相对船坐标系的固定关系,配以外部传感器观测值,如GPS、MRU、Gyro提供的船的位置、姿态、船艏向值,计算得到目标的大地坐标。系统的工作方式是距离测量(range/range)。
短基线的优点:低价的集成系统、操作简便容易;基于时问测量的高精度距离测量;固定的空间多余测量值;换能器体积小,安装简单。短基线的缺点:深水测量要达到高的精度,基线长度一般需要大于40m;系统安装时,换能器需在船坞严格校准。2
长基线定位系统长基线系统包含两部分,一部分是安装在船只上的换能器或水下机器人,另一个部分是布放在海底固定位置的应答器(三个以上)。应答器之问的距离构成基线,基线长度按所要求的工作区域及应答作用距离确定,在上百米到几千米之间,相对超短基线、短基线,称为长基线系统。长基线系统是通过测量换能器和应答器之间的距离,采用测量中的前方或后方交会对目标定位,所以系统与深度无关,也不必安装姿态、电罗经设备,即长基线定位是基于距离测量。从原理上讲,系统导航定位只需要2个海底应答器就可以,但是产生了目标的偏离模糊问题,另外不能测量目标的水深,所以至少需要3个海底应答器才能得到目标的三维坐标。实际应用中,需要接收4个以上海底应答器的信号,产生多余观测,提高测量的精度。系统的工作方式是距离测量(range/range)。
长基线系统的优点:独立于水深值,具有较高的定位精度;多余观测值增加;对于大面积的调查区域,可以得到非常高的相对定位精度;换能器非常小,易于安装。长基线的缺点:系统复杂,操作繁琐;数量巨大的声基阵,费用昂贵;需要长时间布设和收回海底声基阵;需要详细对海底声基阵校准测量。3
 扫码下载APP
扫码下载APP
 科普中国APP
科普中国APP
 科普中国
科普中国
 科普中国
科普中国