

引言
为了使移动机器人能自动避障行走,就必须装备测距系统,以使其及时获取距障碍物的距离信息(距离和方向)。介绍了三方向(前、左、右)超声波测距系统,就是为机器人了解其前方、左侧和右侧的环境而提供一个运动距离信息。在超声波测距中,通常因温度和时间检测的误差,使得测距的精度不高。1
原理1、 超声波发生器
为了研究和利用超声波,人们已经设计和制成了许多超声波发生器。总体上讲,超声波发生器可以分为两大类:一类是用电气方式产生超声波,一类是用机械方式产生超声波。电气方式包括压电型、磁致伸缩型和电动型等;机械方式有加尔统笛、液哨和气流旋笛等。它们所产生的超声波的频率、功率和声波特性各不相同,因而用途也各不相同。目前较为常用的是压电式超声波发生器。
2、压电式超声波发生器原理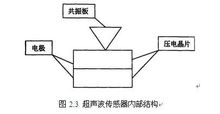
压电式超声波发生器实际上是利用压电晶体的谐振来工作的。超声波发生器内部结构如图1所示,它有两个压电晶片和一个共振板。当它的两极外加脉冲信号,其频率等于压电晶片的固有振荡频率时,压电晶片将会发生共振,并带动共振板振动,便产生超声波。反之,如果两电极间未外加电压,当共振板接收到超声波时,将压迫压电晶片作振动,将机械能转换为电信号,这时它就成为超声波接收器了。
3、超声波测距原理
超声波发射器向某一方向发射超声波,在发射时刻的同时开始计时,超声波在空气中传播,途中碰到障碍物就立即返回来,超声波接收器收到反射波就立即停止计时。超声波在空气中的传播速度为340m/s,根据计时器记录的时间t,就可以计算出发射点距障碍物的距离(s),即:s=340t/2 。这就是所谓的时间差测距法。
超声波测距的原理是利用超声波在空气中的传播速度为已知,测量声波在发射后遇到障碍物反射回来的时间,根据发射和接收的时间差计算出发射点到障碍物的实际距离。由此可见,超声波测距原理与雷达原理是一样的。
测距的公式表示为:L=C×T
式中L为测量的距离长度;C为超声波在空气中的传播速度;T为测量距离传播的时间差(T为发射到接收时间数值的一半)。
超声波测距主要应用于倒车提醒、建筑工地、工业现场等的距离测量,虽然目前的测距量程上能达到百米,但测量的精度往往只能达到厘米数量级。
由于超声波易于定向发射、方向性好、强度易控制、与被测量物体不需要直接接触的优点,是作为液体高度测量的理想手段。在精密的液位测量中需要达到毫米级的测量精度,但是目前国内的超声波测距专用集成电路都是只有厘米级的测量精度。
超声波测距误差分析根据超声波测距公式L=C×T,可知测距的误差是由超声波的传播速度误差和测量距离传播的时间误差引起的。
时间误差当要求测距误差小于1mm时,假设已知超声波速度C=344m/s (20℃室温),忽略声速的传播误差。测距误差s△t
 扫码下载APP
扫码下载APP
 科普中国APP
科普中国APP
 科普中国
科普中国
 科普中国
科普中国