

定义
机器人按 ISO 8373 定义为:位置可以固定或移动,能够实现自动控制、可重复编程、多功能多用处、末端操作器的位置要在3 个或 3 个以上 自由度内可编程的工业自动化设备。这里自由度就是指可运动或转动的轴。1
直角坐标机器人是指在工业应用中,能够实现自动控制的、可重复编程的、运动自由度仅包含三维空间正交平移的自动化设备。各个运动轴通常对应直角坐标系中的X 轴,Y 轴和Z 轴X 轴和Y 轴是水平面内运动轴Z 轴是上下运动轴。在一些应用中Z 轴上带有一个旋转轴,或带有一 个摆动轴和一个旋转轴。在绝大多数情况下直 角坐标机器人的各个直线运动轴间的夹角为直角.2
优点1、任意组合成各种样式:每根直线运动轴最长是 6 m,其带载能力从10kg到200k g。在实际应用中已有近百种结构 的直 角坐标 机器人,这些结构也可以任意组合成新的结构等。
2、超大行程:因为单根龙门式直线运动单元的长度是6 m,还可以多根方便地级连成超大行程,所以其工作空间几乎没有限制,小到手机点胶机,大到1 8 m长行程的切割机超大行程时要采用直线导轨和齿条传动方式。
3、负载能力强:单根直线运 动单元的负载通常小于200k g。但当采用双滑块或多滑块刚性联结时负载能力可以增加5 到1 0 倍当把两根或四根直线运动单元并排接起来使用时,其负载可以增加2到4倍。当采用多根多滑块结构时其负载能力可增加到数吨。
4、高动态特性:轻负载时其最大运行速度可达到 s m /s,加速度可达到4m/s2。使其具有很高的动态特性,工作效 率非常高,通常在几秒内完成一个工作节拍。
5、高精度:按传动方式及配置在整个行程内其重复定位精度可达到0.05mm到0.01mm。
6、扩展能力强:可以方便改变结构或通过编程来适合新的应用。
7、简单经济:对比关节机器人,直角坐标机器人不仅外观直观且构造成本低,编程简单类同数控铣床,易培训员工和维修,使其具有非常好的经济性。
8、寿命长:直角坐标机器人的维护通常就是周期性加注 润滑油,寿命一般是10年以上,维护好了可达20年。2
核心元件直线运动轴也叫直线运 动单元,它就是一个独立的运动轴,主要由支撑载体的铝型材或钢型材和被安装在型材内部的直 线导轨、运动滑块以及作为带动滑块做高速运动的同步带组成。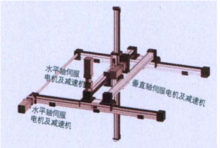
其核心元件为——直线定位单元一个完整的定位单元(系统)由几部分组成:
1、定位体型材:作为轨道的安装支撑部分,该型材不同于一般的框架型材,它要求非常高的直线度,平面度。
2、运动轨道:安装在定位体型材上,直接支撑运动的滑块。一个定位体型材(系统)上,可能安装一根运动轨道,也可能安装多根运动轨道,轨道的特性及数量直接影响定位单元(系统)的力学特性。组成定位系统的轨道种类很,通用的有直线滚珠轨道,直线圆柱钢轨道。
3、运动滑块:由负载安装板、轴承架、滚轮组(滚珠组)、除尘刷、润滑腔、密封盖组成。运动滑块与轨道通过滚轮或滚珠藕合在一起。实现运动的导向。
4、传动元件:通用的传动元件有同步带、齿形带、丝杠/滚珠丝杠、齿条、直线电机等。
5、轴承及轴承座:用于安装传动元件及驱动元。
驱动系统直线运动轴之所以能够实现精确的运动定位,是由电机驱动系统决定的。
常用的驱动系统有:
交流/支流伺服电机驱动系统、步进电机驱动系统、直线伺服电机/直线步进电机驱动系统。每一个驱动系统都由电机和驱动器两部分组成。驱动器的作用是将弱电信号放大,将其加载在驱动电机的强电上,驱动电机。电机则是将电信号转化成精确的速度及角位移。
在要求高动态,高速运行状态、大功率驱动等场合多用交流/支流伺服电机系统作为驱动;在要求低动态,低速运行状态、小功率驱动等场合可用步进电机系统作为驱动;而在在要求极高动态,高速运行状态、高定位精度等场合才会用到直线伺服系统驱动。
注意,直角坐标机器人的传动主要是通过驱动电机的转动带动同步带运动,同步带带动直线导轨上的滑块运动。当驱动轴的最高转速低于600r/ min时通 常选用步进电机,否则选用交流伺服电机。2
控制系统机器人 要在一 定时 间内完成特定的任务,比如每10s内完成一次搬运工作。在完成抓取,加速运动,高速运 动,减速运动,释放工件等同时,还要与相关的设备通过通讯或 I / O口实现一些时序上的协调同步。另外在涂胶应用上,各个运动轴要完成直线和圆弧插补运 动。因此其数控系统要按具体应用要求来选定其控制轴数、I / O 口数量和软件功能。通常选用数控系统,P L C,工控机加运动控制卡和带轴卡功能及 I / O口的驱动电机来做控制 系统。2
根据功能的不同,控制器可以有很多种:
1、工控机与运动控制卡的组合:运动控制卡借用计算机的资源,利用自身的运动控制功能实现控制。
2、脱机运动控制卡:借用计算机编好程序,可将程序自我存储,脱机运行。
3、PLC-借用计算机编好程序,可将程序自我存储,脱机运行。
4、专用控制器。
终端设备直角坐标机器人的终端设备应用途不同,可以装配各种各样的操作工具:
如焊接机器人的终端操作工具是焊枪:码垛机器人终端操作工具是抓手;涂胶(点胶)机器人终端操作工具是胶枪、检测(监测)机器人终端操作工具是相机或激光。
有些工作复杂的工作,单一操作工具不能完成,需要安装两个或以上操作工具才可以。如对于非固定轨迹运动物体的抓取除需要机械抓手外,还需要一个相机,时刻跟踪计算物体的空间位置。
应用因末端操作工具的不同,直角坐标机器人可以非常方便的用作各种自动化设备,完成如焊接、搬运、上下料、包装、码垛、拆垛、检测、探伤、分类、装配、贴标、喷码、打码、(软仿型)喷涂、目标跟随、排爆等一系列工作。特别适用于多品种,便批量的柔性化作业,对于稳定,提高产品质量,提高劳动生产率,改善劳动条件和产品的快速更新换代有着十分重要的作用。
这种类型的机器人的普遍应用是计算机数字控制机器(CNC机器)和3D打印。 最简单的应用是用于铣床和拉丝机,其中钢笔或铣刀在x-y平面上平移,而刀具升高和降低到表面上以产生精确的设计。 拾取和放置机器和绘图仪也基于直角坐标型机器人的工作原理。
分类按用途分:焊接机器人、码垛机器人、涂胶(点胶)机器人、检测(监测)机器人、分拣(分类)机器人、装配机器人、排爆机器人、医疗机器人、特种机器人等。
按结构形式分:壁挂(悬臂)机器人、龙门机器人、倒挂机器人等
按自由度分:两坐标机器人、三坐标机器人、四坐标机器人、五坐标机器人、六坐标机器人。
 扫码下载APP
扫码下载APP
 科普中国APP
科普中国APP
 科普中国
科普中国
 科普中国
科普中国