

在研究没有人参与的定量化的精确系统时,有一系列行之有效的系统理论;但在人机系统、管理系统、经济系统、社会系统等与人的思维活动有某种联系的系统中,由于人脑的逻辑、推理、判断、决策并非完全精确,这种与人有关的系统就具有某种模糊性。随着电子数字计算机向智能机的方向发展,将出现越来越多的模糊系统。
在通常的系统理论中,一个系统在某一时刻的状态和输入一经决定,下一时刻的状态和输出就明确地唯一决定,这种系统称为确定性系统,否则就称为非确定性系统。假定给出系统某一时刻的状态与输入,尽管不能唯一决定下一时刻的状态与输出,但能决定下一状态出现的概率分布,这种系统则称为随机系统,这是一类非确定性系统。如果不能决定下一状态出现的概率分布,但可以确定下一时刻所有可能状态的集合,这是另一类非确定性系统。如果把这种非确定性系统中可能状态的集合用模糊集合来表示,就称为模糊系统。
模糊系统和经典系统一样,它的研究内容也包括能达性、能观测性、最小实现、系统辨识、预测、控制和稳定性等方面。
模糊逻辑基础模糊集合人们的思维中的很多概念没有明确的外延,如“大”、“中”、“小”等,这些模糊概念不能用经典集合加以描述。1965 年 Zadeh 教授提出用模糊集合来描述这些模糊概念,其定义如下:
给定论域 U,U 到[0,1]闭区间的任一映射 , :U→[0,1],u→
, :U→[0,1],u→ 。
。
称为确定了 U 的一个模糊子集 A, 称为模糊子集的隶属函数, 称为u 对于 A的隶属度,反映了 u 对模糊子集 A的从属程度,模糊子集也称模糊集合。
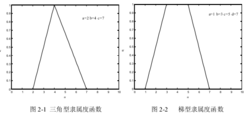
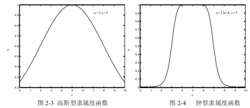
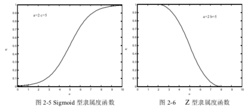
常见的隶属度函数有以下几种类型:三角型函数(图2)、梯型函数(图2)、高斯型函数(图3)、钟型函数(图3)、Sigmoid 型函数 (图4)和Z 型函数(图4)。
三角型函数和梯型函数本质上都是分段线性函数,因此使用和计算比较简单。
高斯型隶属度函数和钟型隶属度函数曲线都具有很好的光滑性,图形没有零点且具有比较清晰的物理意义,是最常用的隶属度函数。
Sigmoid 型隶属度函数曲线同样有着很好的光滑性,与高斯型隶属度函数等不同,Sigmoid 型隶属度函数适合表示非对称性的事物。Z 型隶属度函数是基于样条插值的。1
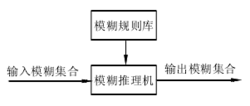
模糊系统的基本架构如图1所示,其中,主要的功能方块包括:模糊化机构、模糊规则库、模糊推理引、以及去模糊化机构。

模糊化机构的功能是将明确的外界输入数据转换成适当的语言式模糊信息;也就是说将明确数据模糊化成模糊信息。
模糊规则库1、语言式模糊规则(Mamdani模糊规则):
 :If
:If is
is and …and
and …and is
is
Then is
is
2、函数式模糊规则:
:If is and …and is
Then is
is 
(1)线性式模糊规则:
:If is and …and is
Then is
(2)单点式模糊规则:
:If is and …and is
Then is
(3)Tsukamoto模糊规则:此模糊规则的后件 采用的是用于单调性隶属函数的模糊集合,因此,每一个模糊规则经过推理后,得到的是一个明确值。
推理引擎将藉由这些模糊规则来进行推理,以决定下一步骤所要采取的决定。以上三种规则的主要差别只在于模糊规则的后件有所不同而已。
模糊推理引模糊推理引擎是模糊系统的核心,它可以藉由近似推理或模糊推理的进行,来仿真人类的思考决策模式,以达到解决问题的日地。
去模糊化机构将经过模糊推理之后产生的结沦,转换为一明确数值的过程,我们称之为“去模糊化”。
由于不同的模糊规则所采用的后件会有所不同,囚此,经过模糊推理后所得到的结沦,有的是以模糊集合来表示(如语言式模糊规则),而有的是以明确数值来表示。
对于推理后是模糊集合的,常用的去模糊化方法有重心法、最大平均法、修正型最大平均法、中心平均法和修正型重心法等;对于推理后是明确数值的,权重式平均法是被最为广泛使用的去模糊化方法。
特点模糊系统的优点是可以融入专家经验,且泛化能力受数据影响小。由于可以系统有效地利用语言形式的专家经验,模糊推理系统已在诸多工程领域获得了应用,然而目前的模糊逻辑系统的输入全为精确值或全为模糊集合,在应用中可能需要能同时输入精确值和模糊语言变量,这需要对现有的模糊系统进行改进;在模糊系统构建中输入、输出空间的划分和隶属度函数及其参数的确定主要依靠个人经验,往往需要反复试凑,具有很大的主观性和不确定性。1
模糊系统类型纯模糊逻辑系统纯模糊逻辑系统仅由模糊规则库和模糊推理机组成,如图5所示,其输入输出均为模糊集合。由于纯模糊逻辑系统的输入和输出均为模糊集合,而现实世界大多数工程系统的输入和输出都是精确值,因此纯模糊逻辑系统不能直接应用于实际工程中。为解决这一问题,有关学者在纯模糊逻辑系统的基础上提出了具有模糊产生器和模糊消除器的Mamdani型模糊逻辑系统,日本学者高木(Takagi)和关野(Sugeno)则提出了模糊规则的后项结论为精确值的模糊系统,称为高木-关野型模糊逻辑系统。
高木-关野(Takagi-Sugeno)型模糊逻辑系统的结构如图6所示,它是一类较特殊的模糊逻辑系统,其模糊规则不同于一般的模糊规则形式。高木-关野型模糊逻辑系统的输出量在没有模糊消除器的情况下仍然是精确值。它的优点是由于输出量可以用输入值的线性组合来表示,因 而 能 充 分 利 用 参 数 估 计 的 方 法 来 确 定 系 统 的 参 数,同时可以用线性控制系统的分析方法来近似分析和设计模糊逻辑系统。该系统的缺点是规则的输出部分不具有模糊语言值的形式,因而不能充分利用专家知识,模糊逻辑的各种原则在此系统中的应用的自由度也受到限制。

在 Mamdani 型模糊系统中,模糊规则的前件和后件均为模糊语言值,它实质上是在纯模糊逻辑系统的输入和输出部分分别添加模糊产生器和模糊消除器,其结构如图7所示。该系统的输入与输出均为精确量,因而可以直接在实际工程中应用。由于其应用的广泛性,又称为模糊系统的标准模型。1

 扫码下载APP
扫码下载APP
 科普中国APP
科普中国APP
 科普中国
科普中国
 科普中国
科普中国