

软起动原理
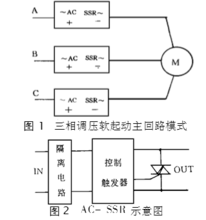 图1所示的三相平衡调压式主回路的软起动装置采用固态继电器SSR,该器件具有工作可靠、开关速度快、工作频率高、寿命长、噪声低等特点,输入端只需很小的控制电压,便可控制器件通断。本文采用非过零型SSR,即随机触发、过零关断。图2为AC-SSR示意图。2
图1所示的三相平衡调压式主回路的软起动装置采用固态继电器SSR,该器件具有工作可靠、开关速度快、工作频率高、寿命长、噪声低等特点,输入端只需很小的控制电压,便可控制器件通断。本文采用非过零型SSR,即随机触发、过零关断。图2为AC-SSR示意图。2
触发脉冲产生电路由NE555组成,图3所示为单相触发脉冲产生电路,另外两相触发脉冲产生电路的结构、原理与此电路相同。将主回路取出的同步信号电压Vi,送入NE555的2脚、起过零同步触发器的作用。改变控制电压Vk的大小,从而改变输出电压V0的脉冲宽度A,输出电压V0送入SSR控制端,实现调压控制。R1、R2和C1也决定脉冲宽度的大小。可调电阻R2用于微调脉宽,确保三相平衡控制的初始触发脉冲宽度相同。从主回路可取得三相独立的同步信号,其频率f=100Hz,严格保证了三相触发脉冲互差60°电角度,满足触发要求。图1所示的控制器是一个三线制系统,因此要负载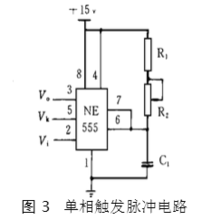 电流流通,至少需两相同时导通,则触发脉宽A不能小于60°电角度。这可通过调节R1、R2、C1和Vk的初始值实现。2
电流流通,至少需两相同时导通,则触发脉宽A不能小于60°电角度。这可通过调节R1、R2、C1和Vk的初始值实现。2
为使系统迅速有效地抑制起动过程时的振荡,调节器采用比例-积分(PI)控制。图5所示为电流调节器的原理图。由电流互感器取来的电流反馈信号Vc加至运算放大器的反向输入端,与给定电压Vd互作用,调节控制电压Vk的大小,实现通过阻止电压的升高来抑制起动电流。在起动过程中,一旦主电路电流达到起动电流上限设定值(由给定电压Vd决定),控制角A即停止增大(电压停止升高),电机在此电压下升速,直至主电路电流降下来,控制角A才继续增加,则电压升高电机加速。实验证明,采用此方案得到了相当理想的软起动效果,起动电流大大降低,起动平稳,在电机稳定运行后,调节给定电压Vd便可调节加在电机上的电压,实现调压调速。2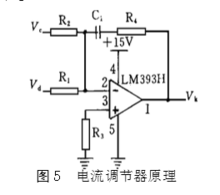
软起动实现方式(1) 限流起动
起动过程中,设置一个界限电流(Im),保持电动机输出的电流值在其之下。在输出电流I
 扫码下载APP
扫码下载APP
 科普中国APP
科普中国APP
 科普中国
科普中国
 科普中国
科普中国