

刘宏,中国工程院院士,中科智库首批入库专家兼审核委员会委员,空间机器人专家。现任哈尔滨工业大学副校长,机器人技术与系统国家重点实验室主任。
刘宏长期从事空间机器人基础理论和灵巧操控技术研究,主持研制出我国首台空间机器人,相关成果成功应用于试验七号卫星和天宫二号实验室,作为主要人员参加过国家高技术发展计划“863”的研究项目,为国家空间安全和在轨服务作出了突出贡献。
中国首个仿人灵巧手
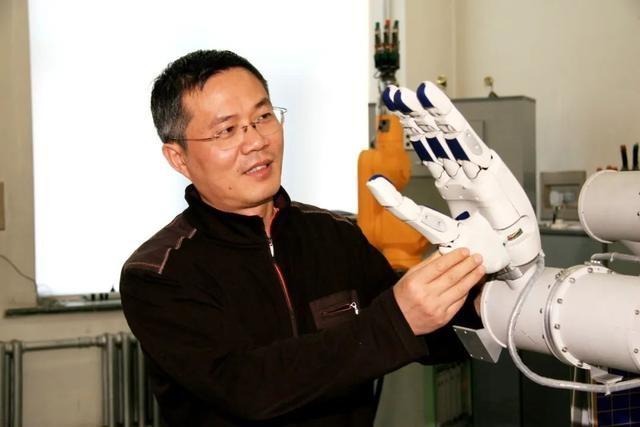
中国的机器人产业起步较晚,但中国机器人灵巧手技术却走在世界前列。2016年,刘宏设计研发的空间机器人灵巧手在“天宫二号”上实现国际首次人机协同在轨维修技术试验,包括拆除隔热材料、拿电动工具拧螺钉、在轨遥操作等,被同行们称为将维修机器人登上天宫二号的“践行者”。
在90年代初,刘宏完成了多种触觉功能的灵巧手及控制系统的研究,提出了宏微操作器系统理论。2001年,刘宏带领团队研制出国内第一个仿人机器人灵巧手,且具有力矩、位置、温度、指尖力等多种感知功能。这项研究填补了中国在机器人灵巧手领域的空白。
中国第一个仿人灵巧手,尺寸与人手相似,有4个手指,每个手指有4个关节,共有12个自由度、96个传感器,共有机械零件600多个,表面贴装电子元件1600多个。该灵巧手可以弹奏简单的乐曲;研究人员佩戴数据手套,可以对灵巧手进行远距离操控,比如远距离遥控灵巧手倒水等。
2006年,刘宏团队又研制出微型力矩传感器运用到灵巧手上。欧洲宇航局、美国布朗大学以及中德多家大学等都成为微型力矩传感器灵巧手的用户。
让机器人来修航天器
关于发展空间机器人的必要性,刘宏说:“汽车可以到4S店保养,飞机可以在地面进行维修,航天器一旦发生问题谁来修?”
空间机器人是在太空中执行空间站建造与运营支持、卫星组装与服务、科学实验、行星探索等任务的特种机器人。我国空间机器人技术研究始于上世纪90年代,2014年我国第一个在轨工作的机械臂上天。近些年,中国科学院、哈尔滨工业大学、北京邮电大学、北京理工大学、北京航空航天大学、航天五院等单位针对空间机器人开展了大量研究,并取得了丰硕成果。
目前,中国新一代的空间机器人可以配备高灵巧机械臂,注入了仿生理念。刘宏称,中国的空间机器人配备的机械臂已经实现多关节连续体、精细操作;实现从单个机械臂走向多个机械臂、人形机械臂;从以前的宇航员在天上“遥操作”,演变成地面“主从遥操作”,再到地面临场遥感操作。
2016年,第十三届空间人工智能、机器人和自动化国际研讨会在北京举行。刘宏会上表示,虽然我国在空间机械臂领域的研究晚于欧美等地区与国家,但是我国的发展速度很快。就空间机械臂来说,我国的水平目前处在世界的前列。
科研是一种乐趣、责任
20世纪80年代中期,我国第一台华宇——I型弧焊机器人研制成功,总设计师是刘宏的老师蔡鹤皋,刘宏说这是一件很伟大的事情,因此报考蔡鹤皋的研究生,一起研究机器人。刘宏表示,搞科研应该打牢理论基础,把基本功练扎实,然后进一步培养创新能力。从整理的事实中发现规律,从而发明创造一些新的东西。
作为教育部首批创新团队“机器人与机电一体化技术”学术带头人,刘宏带领的团队不仅创造了和谐、民主、团结、富有凝聚力的小环境,更为年轻人创造了良好的学术发展大环境。刘宏告诉学生“科研是一种乐趣,也是一种责任,搞科研要耐得住寂寞。”
相关链接:
刘宏院士简介
刘宏,中国工程院院士,中科智库首批入库专家兼审核委员会委员,空间机器人专家。现任哈尔滨工业大学副校长,机器人技术与系统国家重点实验室主任。
长期从事空间机器人基础理论和灵巧操控技术研究,主持研制出我国首台空间机器人,相关成果成功应用于试验七号卫星和天宫二号实验室,为国家空间安全和在轨服务作出了突出贡献。发表学术论文共100余篇,其中SCI、EI收录50余篇。出版专著3部、授权中国发明专利42项、美国发明专利1项、德国发明专利3项。
曾获国家技术发明二等奖4项、欧盟机器人技术与转化一等奖、中国高校十大科技进展、“何梁何利”科技进步奖、全国创新争先奖。先后获中国国家高技术发展计划“863”个人二等奖、中国航天部科技进步三等奖、德国宇航中心科研成就奖。


 扫码下载APP
扫码下载APP
 科普中国APP
科普中国APP
 科普中国
科普中国
 科普中国
科普中国