

简介:无人艇作为海洋无人系统的重要一环,其应用价值和战略意义日益增长。本文从海洋作业需求出发介绍了无人艇及艇-机协同作业面临的一系列挑战,并针对性地讲解了目前该领域包含装备制造、理论研究、应用示范在内的最新研究进展和突破。内容涵盖控制、感知、集群网络调控与无人系统路径规划,详细地对自主无人艇-机集群跨域协同核心理论、关键技术及应用情况进行了介绍。
海洋无人系统是国家海洋强国战略的重要使能技术之一。无人艇作为海洋无人系统的重要一环,其应用价值和战略意义也日益增长。在重大海洋设施探测等作业过程中,往往面临着恶劣、高强度作业水域的突发情况,对无人艇集群协同种类、抗扰能力、覆盖广度、目标识别精度等提出的要求日益严苛。传统艇群协同技术难以做到“以突变应对突发”。同时,随着海洋作业需求日趋复杂,水面无人艇集群拓展为海空跨域无人艇-机集群,但其高效、超稳、高精协同控制技术一直是国际性难题,尚未形成系统的理论与技术解决方案。

图1、自主无人艇集群队形高精度航迹跟踪与相变调控
为解决上述难题,研究者陆续开展对水面异构无人艇集群协同装备、理论与技术研究,聚焦于如何使无人艇能“控得稳、走得直”。船体是无人艇的外驱,目前常见的无人艇有单体、双体结构,单体速度快,双体航行稳,为了使无人艇能满足内河湖、港区和近海作业需求,往往将多类异构无人艇进行编队,协作完成指定任务。如图1所示的航行控制器则是无人艇的内驱,目前航向和航速的耦合机理桎梏着无人艇航行的控制精度,如何对其解耦,实现两者的高精控制是国内研究者正在讨论的热点。
在上述无人艇控制理论技术基础上,无人艇-机集群跨域协同研究也在如火如荼地展开,主要包含以下几个方面:
1、无人艇-机集群作业队形的相跨域协同方法和技术:其关键在于如何在水面运动无人艇的无人机起降、艇-机编队跨域协同效率取得突破,解决快慢子系统的协调问题,以达到提高协同无人艇-机类型,降低水面运动艇-机自主降落误差的目的。达到“调控灵、应对快”。
2、集群协同覆盖、多艇多源感知与高精识别跟踪技术:对无人艇-机协同任务来说,其重点在于如图2所示,将探测模式从平面拓展为立体,提高检测遗落率,降低识别误差,重点在于解决目标姿态变化、遮挡、视角畸变、粼光、雨雾、抖动等带来的影响,做到“识得全、看得清”。目前随着人工智能技术的发展,研究者将Transformer结构引入到目标识别领域。利用其独有的自注意力机制,使集群自适应地对信息进行多层次、跨空间、跨时间的关联,极大地提升了识别的精度。
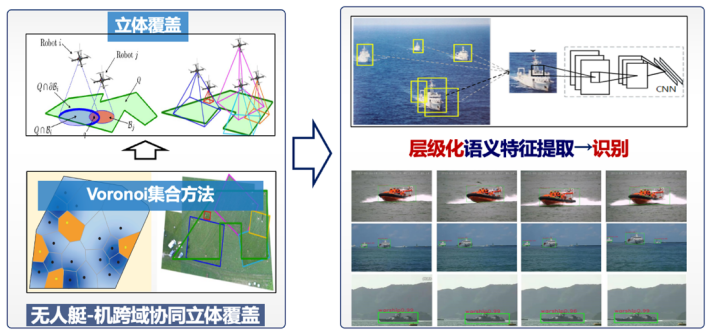
图2、自主无人艇集群协同覆盖探测与目标识别
3、集群韧性增强技术:研究者借助机器学习对无人艇-机集群任务执行数据进行分析,精准定位网络的崩溃临界点,以此来实现集群故障的“点穴式”提前阻断、增强集群韧性,实现故障自愈合。
4、无人艇-机路径规划技术:以往借助、快速扩展随机树、人工势场、动态规划、贝塞尔曲线、遗传、粒子群优化等算法能解决简单场景下路径的自主规划,但如今作业环境日益严峻复杂,传统的规划算法难以兼顾实时性、平滑性和安全性的需求。目前,研究者逐渐采取利用传统启发搜索等算法实时规划最优路径,同时结合深度强化学习算法实现复杂环境下的自主避碰的方式来突破二者的局限性。
以上就是无人艇-机协同领域当前的难点与热点,目前国内无人艇-机集群的研究已逐渐从理论走向实现,开始逐步应用到海洋探测、海上风电场建设等重要工程,逐渐在各类重大海洋设施建设中崭露头角。



 扫码下载APP
扫码下载APP
 科普中国APP
科普中国APP
 科普中国
科普中国
 科普中国
科普中国