

2023年11月19日,中国自动化大会(CAC2023)“现代智能飞行技术专题论坛”于重庆悦来国际会议中心温德姆酒店成功举办。此次专题论坛由重庆邮电大学组织,浙江大学许超教授、上海大学齐俊桐教授与重庆邮电大学刘平副教授共同担任专题论坛主席。来自浙江大学、哈尔滨工业大学、北京航空航天大学、上海大学、广东工业大学、香港理工大学、重庆邮电大学、空军工程大学、亿航智能设备(广州)有限公司等10余所高等院校、政府及业界的专家、学者、业内人士及研究生齐聚一堂,围绕现代飞行技术的运动智能化、无人机集群的协同定位与集群控制、飞行器协同优化控制等方面,呈现了一场精彩纷呈的专题论坛。

会前专家合影
专题论坛由许超教授主持,许超教授对论坛的召开表示热烈的祝贺,对各高校专家教授、学者和相关业内人士的光临表示热烈欢迎。此次专题论坛特邀中国自动化学会会士、北京航空航天大学段海滨教授,哈尔滨工业大学杨嘉楠助理教授,浙江大学许超教授,广东工业大学孟伟教授,上海大学齐俊桐教授,香港理工大学黄海龙助理教授,亿航智能设备(广州)有限公司副总裁张宏,重庆邮电大学刘平副教授八位专家围绕无人机、空地飞行器、自动驾驶飞行器、高超声速飞行器等就现代飞行器的相关技术前沿与新领域应用,进行了多视角多维度分享。

许超教授主持开幕式
中国自动化学会会士、北京航空航天大学段海滨教授首先作了题为“仿鹰眼视觉的无人机自主空中加油”的开场报告。段教授幽默风趣的分析了空中加油这一“云端穿针”技术对于解决无人机载重与续航矛盾的重要意义,然后结合仿鹰眼技术重点介绍鹰眼的视觉感知机制,阐述了无人机自主空中加油的关键核心技术难题,给出了基于鹰眼视觉实现空中加油的技术路线,并分享了当前鹰眼视觉在无人机自主空中加油中应用的最新进展。段教授的报告深入浅出,赢得参会者阵阵掌声。

段海滨教授作报告
哈尔滨工业大学杨嘉楠助理教授作了题为“空地跨域机器人决策与控制”的学术报告。杨教授首先介绍了空地两用机器人在空间测绘、工况巡检、目标搜索等方面的应用情况;然后,结合自身在空地两用机器人方面的丰富研究成果,介绍了一类旋翼式空地两用机器人构型设计,给出了自主决策与规划算法理论,分享了空地模态平滑控制等研究工作;最后,张教授对空地两用机器人的未来发展趋势进行了分析。与会观众对张教授的报告兴趣浓厚,纷纷进行了深入的交流。

杨嘉楠助理教授作报告
广东工业大学孟伟教授,结合旋翼无人机飞行控制与数字孪生技术作了题为“旋翼无人机鲁棒飞行控制及数字孪生系统”的学术报告。首先,孟教授报告了目前在旋翼无人机鲁棒飞行控制相关研究进展,介绍了鲁棒飞行控制器的算法及其算法验证实验;然后,孟老师介绍了在无人机数字孪生系统研究进展,分析了数字孪生虚实闭环系统的系统构架、系统应用、系统运行流程等;最后,孟老师详细介绍了广东工业大学无人自主系统团队的一些装备研发进展和丰厚的研究成果。

孟伟教授作报告
上海大学齐俊桐教授,作了题为“复杂无人系统集群与协同控制”的学术报告。首先,以无人机、无人车、无人艇为代表的无人系统为切入口,介绍了近年来已经在生产生活各领域发挥着越来越重要的作用。然后,介绍了随着工作任务的复杂性以及所处环境的动态不确定性,无人系统将会向着智能化、自主化、集群化发展,无人系统集群控制将成为该领域发展的重要使能技术。最后,齐教授以无人系统集群技术为重点,结合目前团队的研究进展,从单机智能控制切入,再对集群控制技术的特点、难点、技术突破、应用等方面进行了详细的分享。
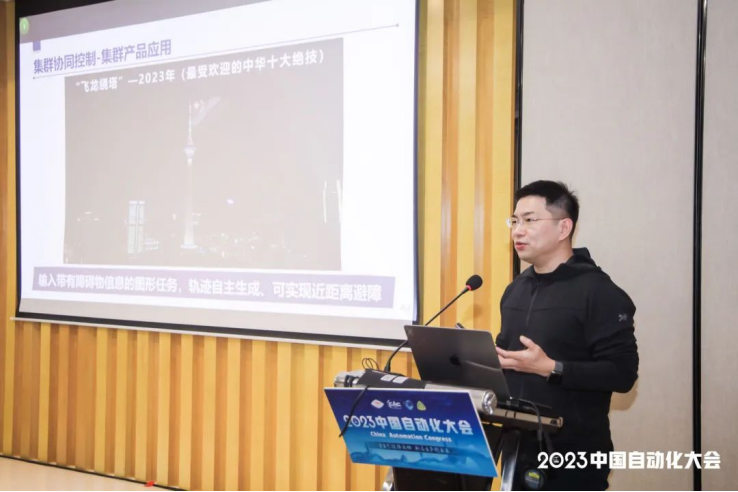
齐俊桐教授作报告
第五位报告人为香港理工大学黄海龙助理教授,报告了题为“空中航母承载无人机的任务执行及回收技术”的学术报告。首先,黄教授介绍一种空中航母承载小型无人机的任务执行及回收技术。然后,从研究动机引入,介绍了通过空中航母承载小型无人机飞往目标地点并将其释放执行任务,最后再回收小型无人机回到空中航母的方式,提升小型无人机的作业范围,其次,介绍了通过基于凸优化的轨迹规划算法,使得空中航母与无人机之间的任务执行及回收过程更加高效、安全、精确。此外,系统还考虑了安全几何约束,确保了无人机在回收着陆过程中的安全性。最后,黄教授同与会观众分享在上述关键技术研究与应用方面的进展与思考,并进行了问答交流。

黄海龙助理教授作报告
第六位报告人为亿航智能设备(广州)有限公司张宏副总裁,报告了题为“智能自动驾驶飞行器引领城市空中交通(UAM)的创新变革”的学术报告。首先,张总裁以聚焦城市空中交通在全球交通出行方式领域的颠覆性潜力为开篇,分析了城市空中交通的六大核心板块和四大基础需求;其次,分享了载人级无人驾驶电动垂直起降航空器及相关技术,为未来的智慧交通提供低空中短途交通运输解决方案;最后,展望了未来融合空域管理和未来发展。

张宏副总裁作报告
第七位报告人为重庆邮电大学刘平副教授,报告了题为“高超声速飞行器的轨迹优化与数据驱动轨迹决策”的学术报告。首先,刘平副教授从马斯克星舰发射引出高超声速飞行器(hypersonic vehicle, HV)研究对象;进一步,介绍了其在军事和民用领域具有广阔应用前景和在无人太空探索方面潜在的民用/科学应用价值;然后,考虑到HVs在再入阶段没有推力,完全依靠空气动力来实现飞行调整,分析了再入阶段的轨迹优化结果对飞行器的控制精度和飞行任务安全的重要性;最后,刘平副教授分享了高超声速飞行器再入段轨迹优化的最优控制算法,同时基于最优化控制轨迹优化理论,结合数据驱动分类方法,分析此类方法在其他领域的拓展应用前景。

刘平副教授作报告
最后,浙江大学许超教授作了题为“飞行力学可视化建模与运动智能化(Visual Modeling of Flight Mechanics and Locomotion Autonomy)”的压轴学术报告。报告深入浅出的介绍了自然界集群背后隐藏极其深奥的科学道理,从湍流可视化测量的角度切入,讨论集群粒子的表征与计算,尤其是引入混合学习架构,融合集群粒子计算与湍流数学模型进行物理场高效重构。基于此,许教授结合无人机,分享了无人机集群在飞行力学可视化建模的可行性,并分享当前的研究进展,并对其未来的控制进行了设想。

许超教授作报告
此次专题论坛为与会者提供了一个深入交流学术观点、分享研究成果的重要平台,对现代智能飞行技术的发展与新领域应用起到了积极的推动作用。

 扫码下载APP
扫码下载APP
 科普中国APP
科普中国APP
 科普中国
科普中国
 科普中国
科普中国