

2022年9月30日,经过约1个小时的天地协同,问天实验舱完成转位,中国空间站组合体暂时由“一”字构型变成“L”构型。11月3日,梦天实验舱通过相似的转位程序,使空间站形成了“T”字构型。那么空间站舱段转位需克服哪些技术难关?两次舱段转位又有何亮点呢?就让我们一探究竟吧。

梦天舱转位成功
为什么空间站要“翻飞”起来组装?
问天实验舱发射之初,对接在天和核心舱节点舱正前方接口,形成了“一”字构型。10月31日,梦天实验舱发射,次日成功对接于天和核心舱前向端口。
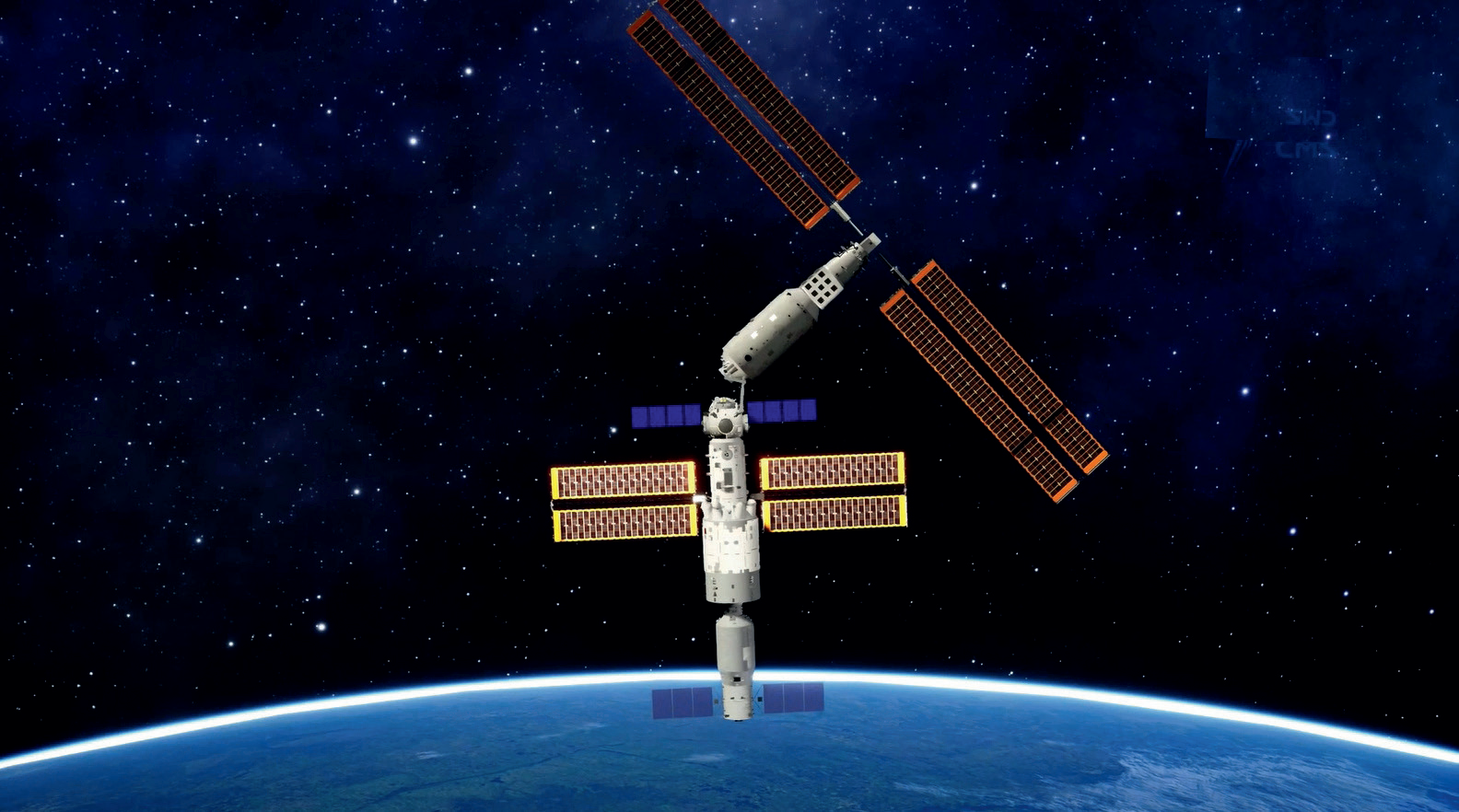
问天舱转位过程效果图
有人不禁好奇:为什么两个实验舱不直接对接到节点舱侧面接口,“一步到位”达成最终状态呢?
这主要是因为空间站组合体遵循第一宇宙速度飞行,经计算显示,如果实验舱直接从侧面接近天和核心舱,即使两者的轨道之间只有很小的夹角,双方的相对速度也会相当可观,不能排除因控制误差导致撞击的风险。
梦天舱对接于天和核心舱前向端口
这样的撞击显然是科研人员无法接受的。虽然空间站各舱段在设计和制造的过程中都充分考虑到强度问题,但航天器受到运载火箭发射能力的限制,不可能刻意无限加固,自然不能承受住高速撞击。更何况,即便舱段安全,造成姿态剧烈变化也会隐患重重。
所以两个实验舱最初都被发射到天和核心舱的前方,处在同一个平面和轨道上,以很小的相对速度值逐渐接近,实施对接。
按照轨道动力学的基本原则,在这个对接过程中,两者的轨道高度仍会发生相对变化,但只要速度差控制得好,轨道高度变化就会很微弱,不会超出对接机构的补偿能力范围。
初步对接完成后,经过一段时间测试,天地团队确认实验舱的状态正常,就会动用机械臂辅助,把实验舱转移到天和核心舱的侧面对接口上。
问天舱转位后,空间站形成“L”字构型
可能有人觉得:太空处于失重状态,机械臂处置20多吨的东西应该困难不大。
事实上,大型舱段移动所产生的惯性不容忽视。如果在转位过程中没控制好速度,就会超出机械臂的扭矩范围,发生险情。所以实验舱的转位过程相当谨慎,还需要得到力矩陀螺协助。
力矩陀螺的“贡献”在哪里呢?由角动量守恒原理决定,只要机械臂把实验舱向侧面移动一点,那么天和核心舱就会发生相应的角度变化,朝着反方向转动一点。在这个过程中,空间站的轨道方向其实没变,但偏航角会发生很大的变化,这对于太阳翼帆板、散热板、数传天线等设备的工作是不利的,所以就需要靠力矩陀螺“消化”这部分角动量,使空间站组合体保持天和核心舱与轨道切线平行的状态。
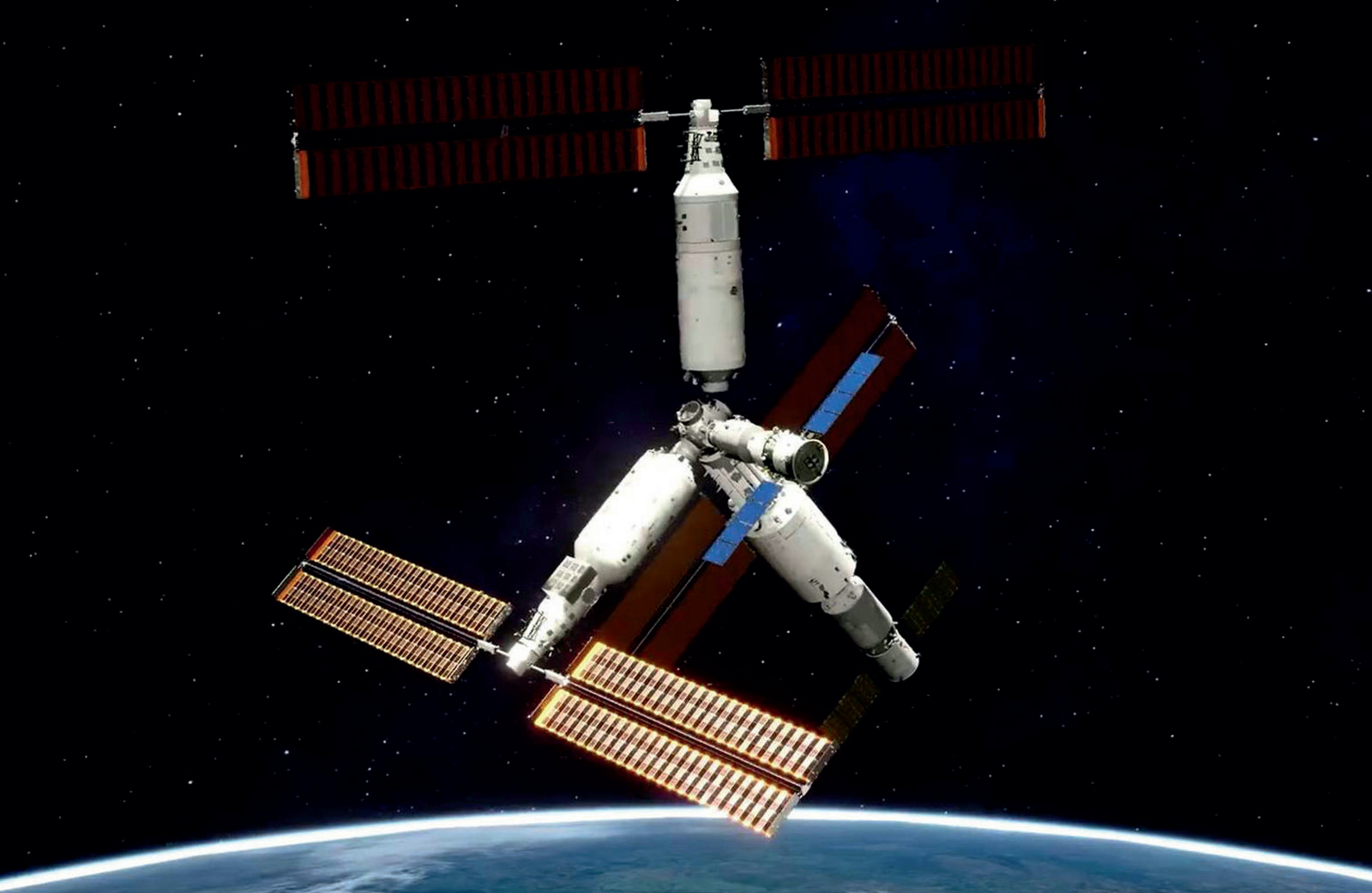
梦天舱转位组装效果图
太空稀薄大气会对空间站产生什么“蝴蝶效应”?
从理论上说,在真空环境里,任何形状的物体都可以保持原本的运动状态,不会发生姿态和方向的改变。然而,现实不会这么理想化。空间站运行轨道高度达到数百千米,大气已经非常稀薄,但仍然会不断积累微弱的大气阻力,逐渐对航天器的姿态和轨道形成显著影响,所以近地轨道航天器对于姿态控制仍然需要谨慎小心。
举例来说,当问天实验舱对接到节点舱侧面对接口之后,大气阻力问题就不容忽视了。问天号实验舱长17.9米,大柱段直径达4.2米,加上太阳翼帆板,相当于在空间站正前方形成了巨大的迎风面。
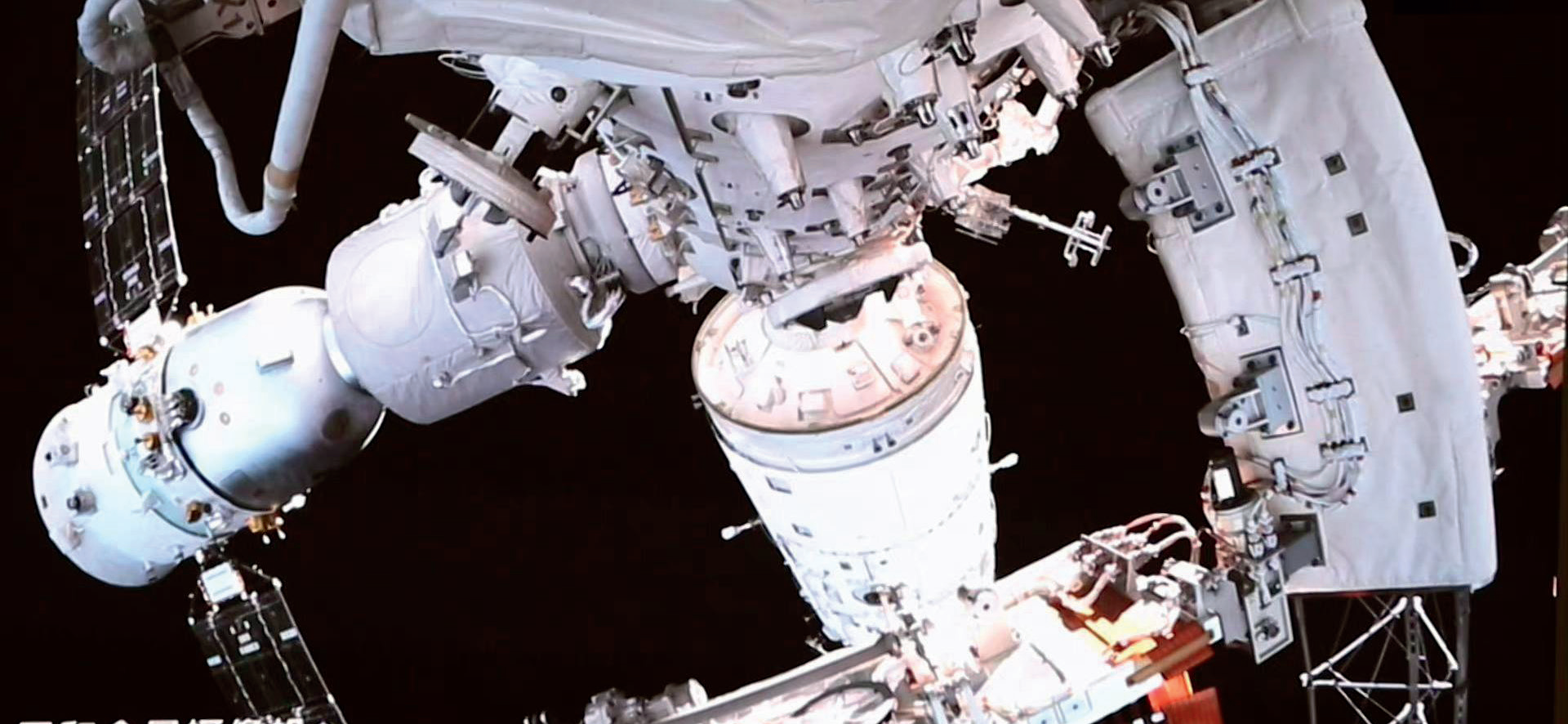
大舱段转位细节
对比国外同类,国际空间站因为大气阻力等问题,每月轨道高度都会下降2千米左右,必须由飞船升轨补偿。那么中国空间站实验舱遭遇的阻力问题也会引发各种后果,比如使整个空间站组合体产生一定的扭矩。有关扭矩如果不进行纠正的话,空间站组合体就会被推动着旋转起来,向一侧过度转动。
同样以问天舱的转位过程为例,假如“L”的直角顶点最终稳定地指向轨道飞行方向,而问天舱、天和核心舱各自在轨道方向两侧呈45度角,那么对于太阳能发电、散热和无线电通信都不是好位置。另外,当时空间站组合体必须为迎接梦天实验舱做好准备,空间站组合体也必须回到正常位置,准备好天和核心舱的正前方对接口。
要做到这一点,必须靠力矩陀螺和推力器联合作用,把不平衡空气阻力造成的扭矩重新平衡。一般来说,这种计划内的工作更倾向于使用力矩陀螺,因为空间站上携带的燃料是宝贵且有限的,必须节约使用。虽然货运飞船会定期为空间站送去补给,但太空环境复杂凶险,空间站必须随时准备应对意外情况。假如出现太空垃圾、微小天体、航天器等异常接近的情况,空间站就需要耗费宝贵的燃料,改变轨道,保障航天员和设备安全。
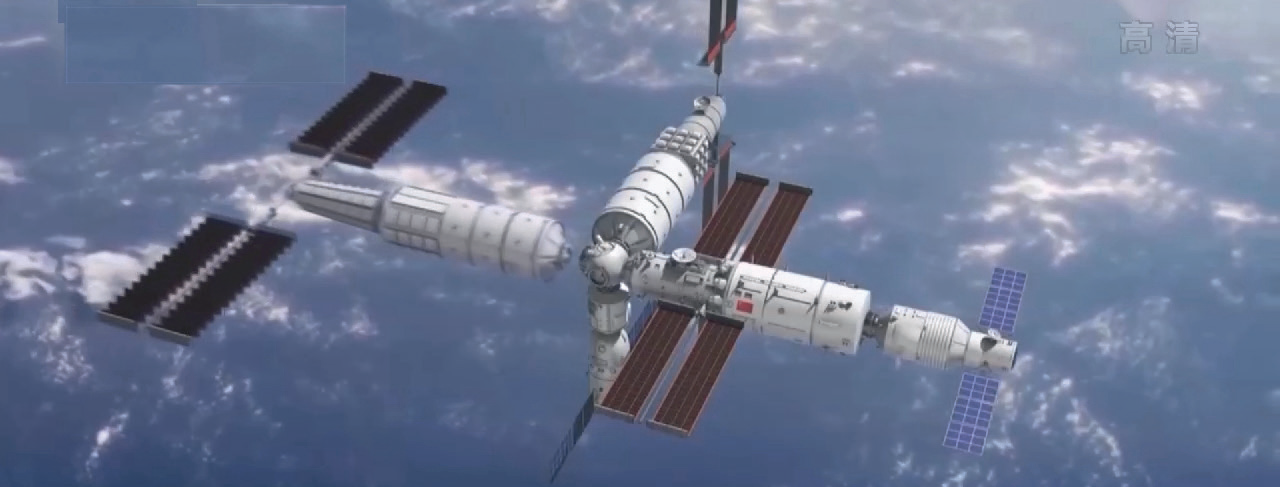
11月初,梦天实验舱初步和空间站组合体对接后,又完成了转位工作,最终对接到另一个方向的天和核心舱侧向接口上,而这同样是力矩陀螺、机械臂紧密配合的结果。
随着11月3日梦天实验舱转位完成,中国空间站组合体形成了较平衡的状态:天和核心舱对接口的径向是神舟载人飞船,两侧分别是问天舱和梦天舱,后方对接口上是天舟货运飞船。
在航天员“太空交班”的时候,节点舱对接口还要迎来神舟载人飞船,同样需要面对阻力不平衡的问题。不过神舟飞船的“迎风面积”比较小,造成的不平衡扭矩也会相对轻微很多,用力矩陀螺简单纠正就有望解决。
中国空间站转位方案有什么优势?
国外的空间站此前经历过舱段转位,采用的是垂直转位方案,转位后组合体姿态会发生大幅变化。事实上,中国空间站是国际上第一个采用平面转位方案的,效果更优。不过,相比20多吨重的大型舱段,只有100多千克的机械臂连接两舱,风险不小,所以实验舱转位过程被形容为“一根扁担挑起两头大象”。
整个转位过程中最大的限制因素应该是惯性。由于物体的动能与速度的平方成正比,如果转位速度太快,造成的冲击力就非常显著,会给转位机构和机械臂带来巨大的扭矩,易造成设备损坏。特别是在舱段需要停下的时候,如果出现刹车式情况,惯性可能使机械臂有报废的危险。因此,平面转位要求天地团队对舱段、机械臂运行速度进行精确计算和严格控制。据公开报道称,科研单位在地面设施上大量进行了计算机仿真和气浮台模拟工作,解决了姿态控制、中继测控链路遮挡和能量平衡等多方面的问题。此外,去年初天和核心舱对天舟货运飞船进行了转位操作,考虑到天舟货运飞船的体积和重量都比问天实验舱小得多,非常适合天地团队和机械臂“练手”。
总之,经过相当复杂的操作,两次实验舱转位成功,如果要做简单描述,要领就是“慢”和“准”:“慢”就是尽量降低加速度,不能超过机械臂和转位机构的承受能力;“准”就是确保实验舱转位“一次到位”。
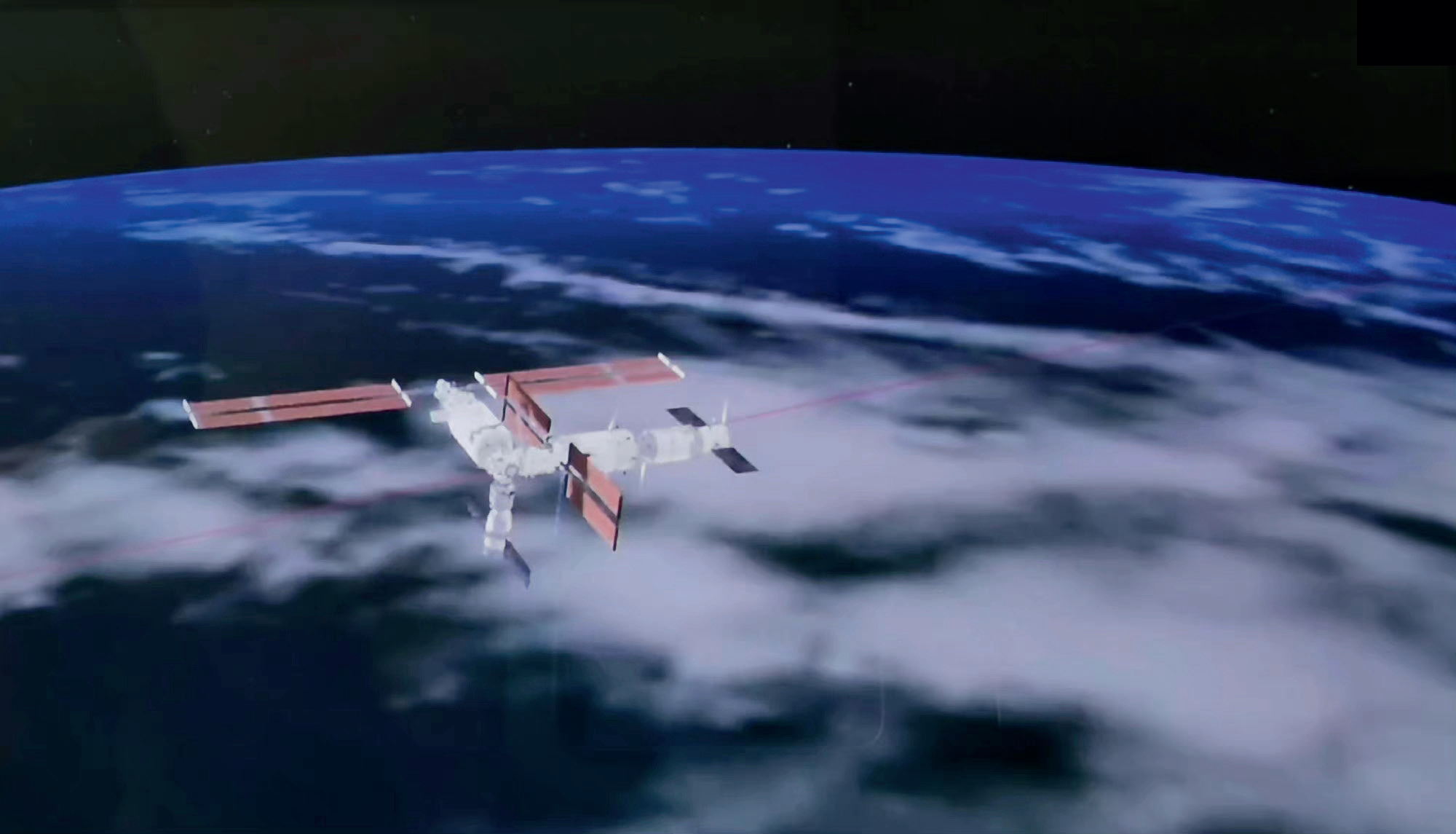
如今,中国空间站已经形成了水平对称的“T”字构型,航天专业人士认为,这样有三大好处。首先是能够保证整体质心居中,节省姿态控制所需的能量。其次是两个实验舱的气闸舱分别位于“T”字一横的端头,因此在正常泄压或异常隔离时,均不会影响其他密封舱段构成连贯空间,从而能够保证安全性。最后是确保两个实验舱末端的大型太阳能电池翼不管空间站以何种姿态飞行,都能够照上太阳,让空间站日发电量可达近千度,相当于一个普通家庭近半年的用电量,为中国空间站三舱组合体提供80%的能量,在满足空间站上的各类科学仪器正常运转的同时,也能保航天员在轨日常生活。
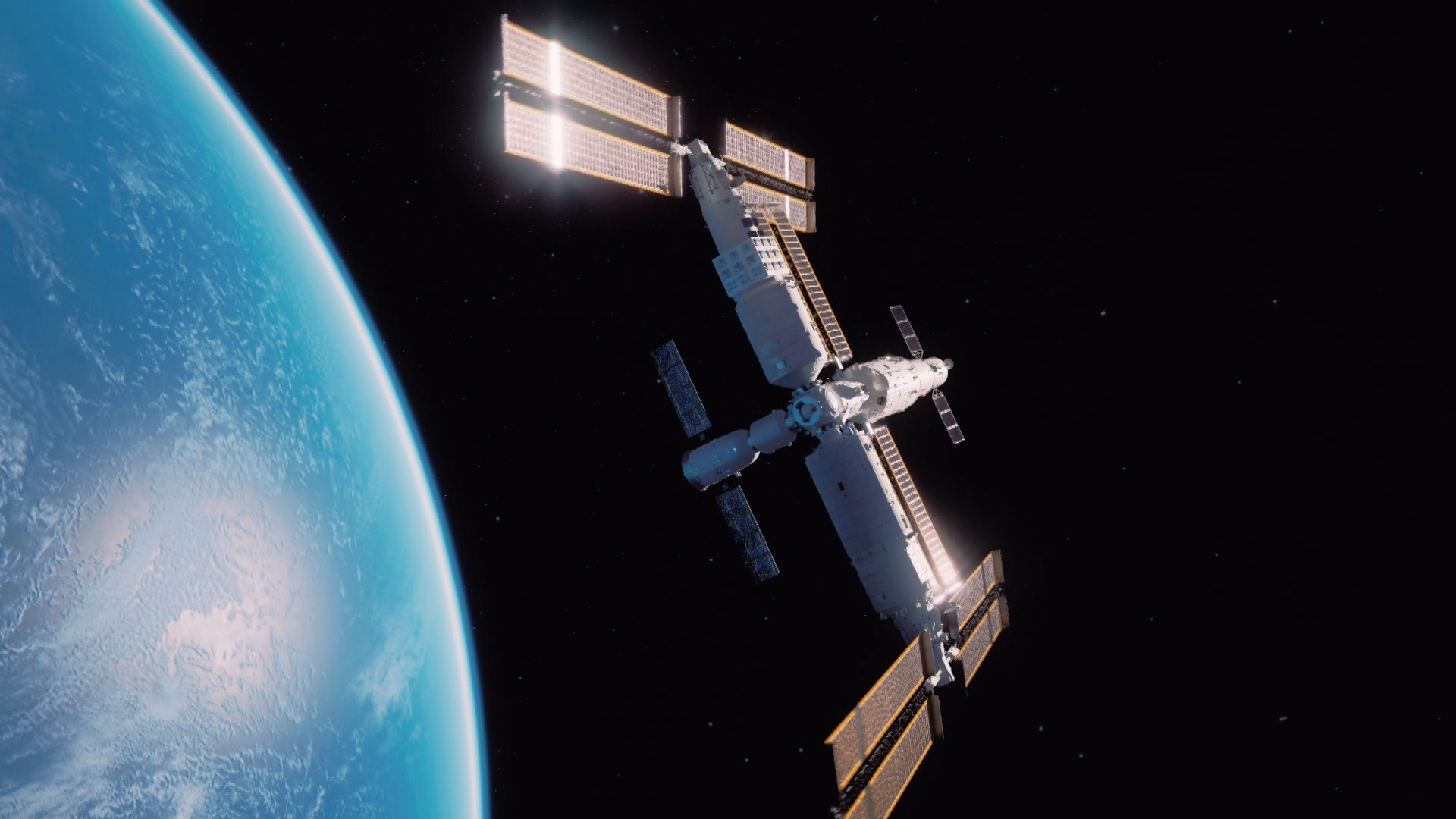
中国空间站“T”字构型示意图
形象地比喻,空间站看似在太空中四平八稳地飞行,其实无时无刻不在“耍杂技”——伴随着飞船、舱段等对接、离去,空间站的构型、重心、受力情况、轨道等不断发生着变化,要求天地团队遵从规律,精密细致地调整完善。这应该就是航天控制科学极具挑战性却又充满了乐趣的原因所在。



 扫码下载APP
扫码下载APP
 科普中国APP
科普中国APP
 科普中国
科普中国
 科普中国
科普中国