

近日,中国科学院合肥物质院智能所祝辉、余彪团队在地面无人车辆复杂地形机动性预测研究方面取得进展,三篇相关研究成果相继发表在机器人与智能车辆领域顶刊IEEE Robotics and Automation Letters (IEEE RA-L)和IEEE Transactions on Vehicular Technology (IEEE TVT)上,并且被机器人顶会IEEE International Conference on Robotics and Automation (ICRA 2024)接收。
近年来,随着地面无人车辆关键技术的不断突破,地面无人车辆被广泛应用于军事、极地探索、深空探测等复杂非结构化环境以执行相关的任务。然而,由于沙地、滩涂、雪地、月壤等典型非结构化环境松软地形存在低承载力与低附着力特性,极易造成装备下陷与打滑,进而导致其机动行驶效率低下甚至无法通行。如何快速且高精度地预测地面无人车辆在复杂非结构化地形上机动能力,已经成为其任务执行成功与否的关键因素之一。
高保真度的模拟技术,如离散元方法,由于其模拟精度高优势,被广泛应用于模拟预测地面无人车辆复杂地形机动性。然而,基于离散元地形模型的整车遍历仿真过程,尤其涉及求解大范围地形上百万级颗粒的迭代计算时,计算非常耗时。为了解决这一问题,团队提出了一种双重神经网络增强的全局机动性预测模型。首先,通过开发一种自适应人工神经网络代理模型 (ANN-RVE),实现了车辆-地形接触力学仿真的加速。该模型基于多尺度代表性体积单元地形模型,通过预测应力和应变关系,有效替代了复杂的非线性迭代计算。其次,通过引入边界数据增强的人工神经网络模型,加速了全局机动性地图的生成过程。该模型通过整车遍历模拟小样本高斯采样的地形数据以及在机动性分类边界处的额外增强地形数据,生成一个机动性训练数据集。训练过的人工神经网络随后被用于预测机动性地图,从而避免了遍历整个地形的耗时过程。相关实验验证了所提出的方法在确保了高预测精度的同时,显著降低了计算耗时。
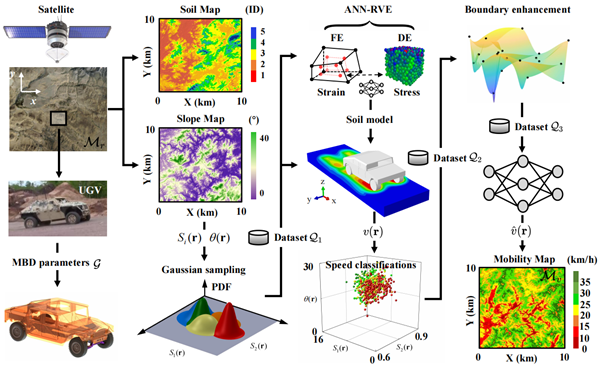
图1 基于双重神经网络增强的全局机动性预测框架
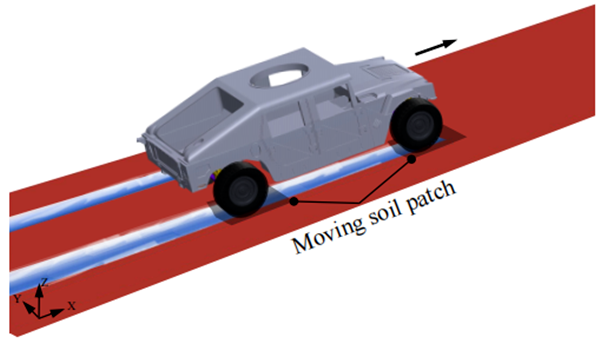
图2 基于ANN-RVE地形模型的机动性仿真过程
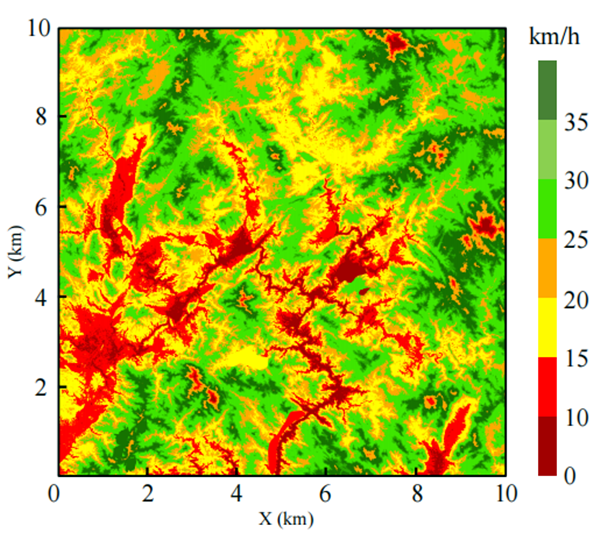 图3 全局机动性预测地图
图3 全局机动性预测地图
 扫码下载APP
扫码下载APP
 科普中国APP
科普中国APP
 科普中国
科普中国
 科普中国
科普中国