

科技创新引领家居清洁革命
作者:邢伯阳
近几个月来,小鹏、小米都推出了各自的人形机器人,特斯拉更是推出了震撼市场的擎天柱人形机器人V1.3版本,包括机械之心、稚晖君等大V都认为以智能机械臂、激光雷达多模态视觉融合、大模型、人工智能为核心的家居服务机器人将离我们的生活越来越近,像斯坦福Aloha这样的技术一旦成熟、科幻片中机器人收拾房间、清扫地面、垃圾归类的场景将成为现实。有意思的是,这些技术的发展不但推动人形机器人落地,也助力越来越多的家用机器人更加智能,传统的扫地机器人领域迎来了重大的技术变革。

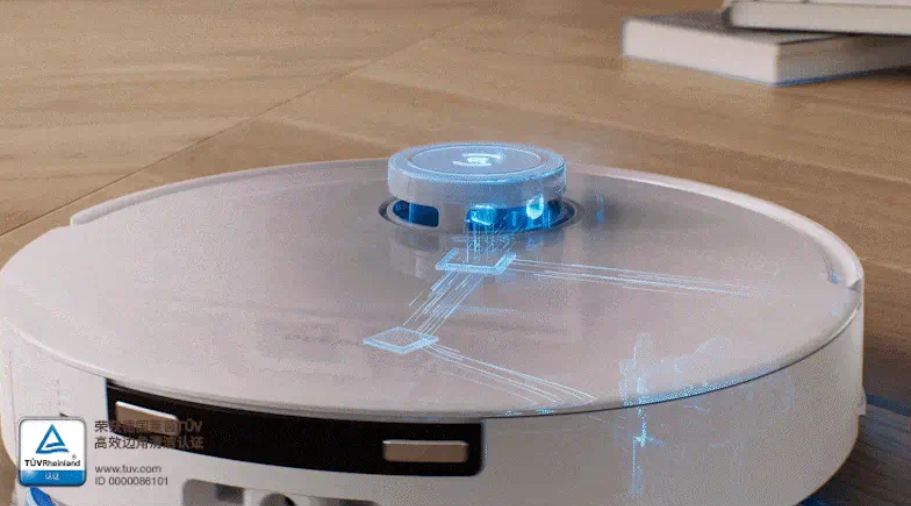
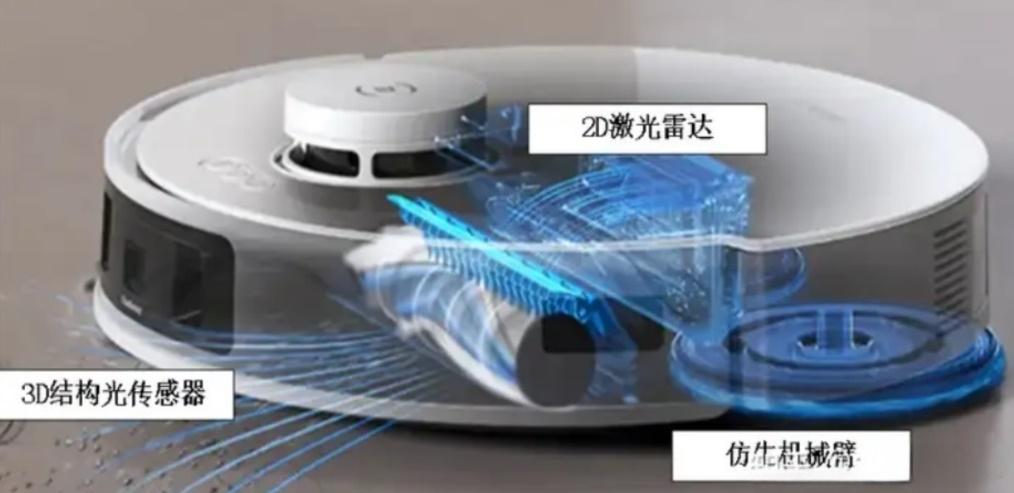
最近科沃斯就将智能作业机械臂、多模态感知技术部署在他们全新产品T30上,除了在视觉、雷达、结构光传感器的硬件加持外,科沃斯T30在软件方面也有极大提升——将智能作业与人工智能算法运用在扫地机器人领域,使扫地机器人能够检测并识别地面上各种异形障碍物,灵隙灵动恒贴边技术能全方面提升机器人的贴边清扫能力,让扫地机器人能够轻松避让障碍物,更高效率完成清扫任务。
1、动态智能的机械臂清扫作业——灵隙技术
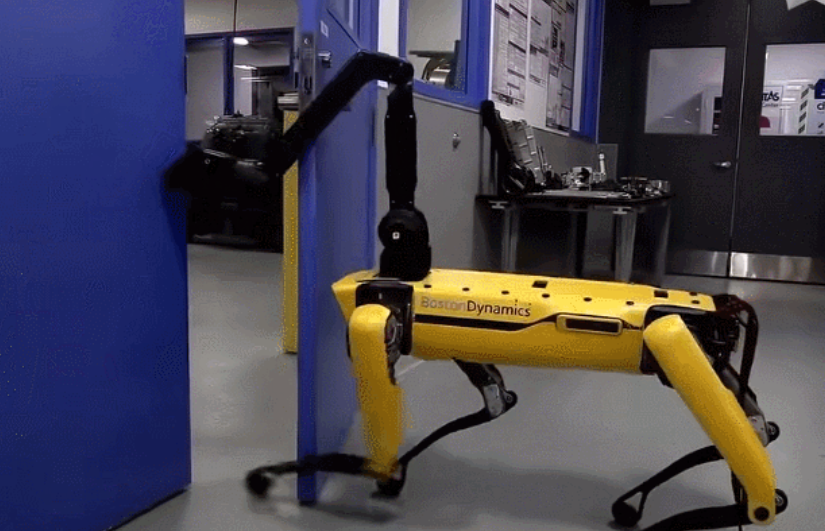
在我一直研究的四足机器人技术中,结合机械臂作业可以说是最困难也是最复杂的技术环境,目前波士顿动力公司SpotMini机器人领先全球,其搭载的灵巧作业机械臂,可以通过足臂协同控制算法完成对机械爪末端位姿的稳定控制,即我们常说的“鸡头稳定”技术,借助该技术Spotmini实现了舞蹈、开门、自主抓取等多个实用又有趣的作业功能:
科沃斯T30机器人这次首创的灵隙灵动恒贴边技术,其核心是通过“足臂协调”的控制方式让扫地机器人在清扫中主动控制机械臂清扫机构紧贴墙沿。这不但需要机械臂快速响应墙面起伏变化,还需要智能软件算法实现机体避让障碍时机械臂末端位姿的协同规划。T30借助其恒压清扫功能可以保证仿生机械臂与地面具有恒定的接触压力,从而实现对地面起伏与不同污渍类型的定制化清扫。
T30机械臂模组的清扫结构总共有两个模块:一个是固定旋转的清扫模块,另外一个是可以随机械臂伸缩的模块。通过二者配合,实测可以实现非常好的贴边清扫效果;在APP界面中灵隙技术的动画介绍页展示了其全场景恒贴边,边角满格覆盖,灵动适应复杂环境的技术特点;

下面以SpotMini四足机器人为例,简单介绍下移动作业机器人是如何实现“足臂协同”的,首先对于移动机器人来说,其采用的是浮动基座动力学模型,因此要实现机器人身体与机械臂末端的协同控制,除了需要构建精确的运动学模型外,还需要构建动力学模型。以Spotmini为例其采用了全身动力学WBC控制方法实现,WBC控制全称为Whole Body Control,其是一种多任务优先级的控制方法,通过合理优化各个关节实现对设定末端姿态与末端位置不同任务优先级下的最优控制,因此WBC即求解了如下的带约束数学优化问题:
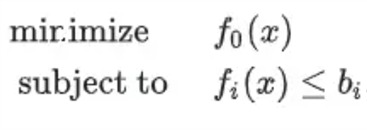
WBC之所以叫全身动力学,除了其采用了机器人整机动力学模型外,算法还可以完成对关节角度、速度或加速度不同任务层级指令的计算:

四足机器人则常用零空间法来构建WBC控制器,比较有代表的MIT开源的MiniCHeetha机器人采用的控制方案:

科沃斯T30机器人恒贴边技术与四足机器人足臂协同技术有异曲同工之处:
(1)之前见过一些有动态机械臂的扫地机器人,虽然实现了主动机械臂控制,但在机器人转角移动中会出现倒车或原地掉头的效果,这样使得机械臂会与环境发生碰撞并且减低了效率;
(2)T30产品在贴墙清扫中除了机械臂随墙面随动的效果,机械臂末端位置曲线与底盘运动轨迹相互配合,实现了近似“足臂协同”的控制效果;
除了上面的特点外,T30本身从机械臂驱动机构设计上也作业很多优化改进,为了实现更高效的地面清扫,T30还可以实现下压力恒定功能,这与工业机器人中柔顺打磨的技术路线非常一致,通过恒定压力的方式可以让清扫机构与地面的接触更加稳定,避免了漏扫与地面起伏导致的清扫效果不一致的问题,在工业机械臂打磨中采用了阻抗控制等方法来实现上述功能,但核心仍然是控制系统本身的动力学控制技术。
2、机械臂恒贴边T30与环境深度共融——多模态环境感知技术
T30实现恒贴边除了灵隙技术中“灵隙无极悬停,柔性伸缩”技术手段外,更重要的是机器人本身多模态环境感知与环境共融的能力。如果说机械臂无极悬停可以让机器人实现清扫机器人与本体运动状态的协同控制,那如何在室内清扫作业中规划合理的清扫路径、什么时候采用柔性伸缩实现恒贴边才是最大的难题。
室内清扫环境虽然不如四足机器人越野场景那么复杂,但是仍然具有很大挑战。比如随意放置的桌椅、掉落的物品,如果清扫机器人无法对其感知很可能出现卷入清扫激光或阻碍机器人移动。传统清扫机器人主要采用2D激光雷达实现对环境地图的构建和自主导航,T30则进一步融入了LDS雷达、3D结构光和沿边传感器,通过对上述传感器多模态数据的深度融合,构建对室内作业场景的全息感知地图:
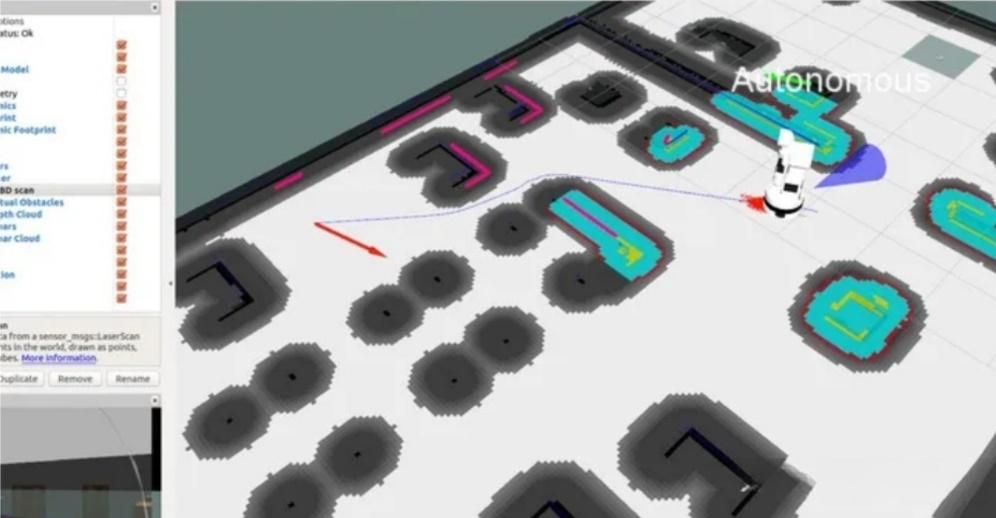
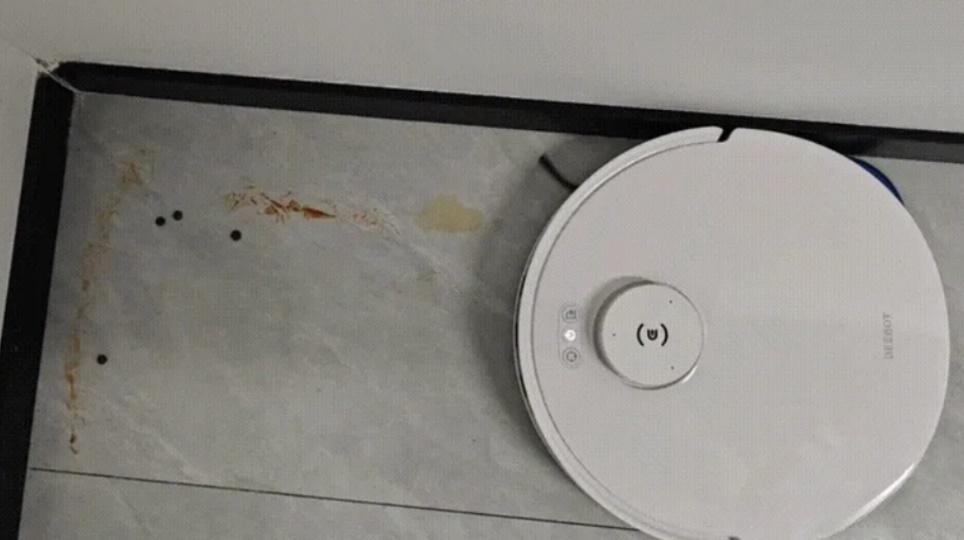
以T30通过桌角为例,传统扫地机器人通过碰撞传感器可以感知是否与环境障碍物碰撞并重新规划后续清扫路径,但带来的问题是机器人清扫效率很低,并对于很多低矮障碍或比较细的障碍物在远处激光雷达难以准确探测。
因此融合视觉传感器最大的优势就是可以完成对上述障碍物深度信息的采集,并与激光雷达里程计位姿估计结果匹配融合,实现更准确的感知。在仅采用2D雷达导航的机器人系统中,由于雷达传感器只能扫描到单一平面的距离信息,导致所建立的占据栅格地图只能探测雷达安装平面。上图中黑色的部分描述了被障碍物占据的区域,机器人是不能从这些地方通过的,而是在后续路径规划中通过导航算法对齐进行规避,从而实现了在室内环境下的安全自主移动。但如果没有被建立在该地图中的障碍物,机器人将会直接略过,在实际场景中就十分容易出现与障碍物碰撞,因此对于室内环境中低矮或者尺寸很小的障碍物仅依赖单一传感器数据进行探测是难以实现的。
在自动驾驶中常常提到的BEV技术正是借助多模态传感器融合的手段构建高分辨率与高精度的三维占据地图或鸟瞰图,从而保证无人驾驶车辆安全通行。通过融合激光雷达、视觉深度信息机器人可以构建真正的3D占据地图,并在导航和路径规划中考虑障碍物高度、尺寸,保证机器人安全绕行,下面视频中测试了T30在狭窄区域内的自主导航,可以看到机器人在桌椅、沙发间可以灵敏穿行;另外,通过视觉信息T30还可以自主完成对地形语义熟悉的识别,测试中我并没有设定地毯区域,但是T30会自动在地毯区域停止拖地,并只在木地板才放下机械臂进行拖地作业,这里真的令我十分惊讶!

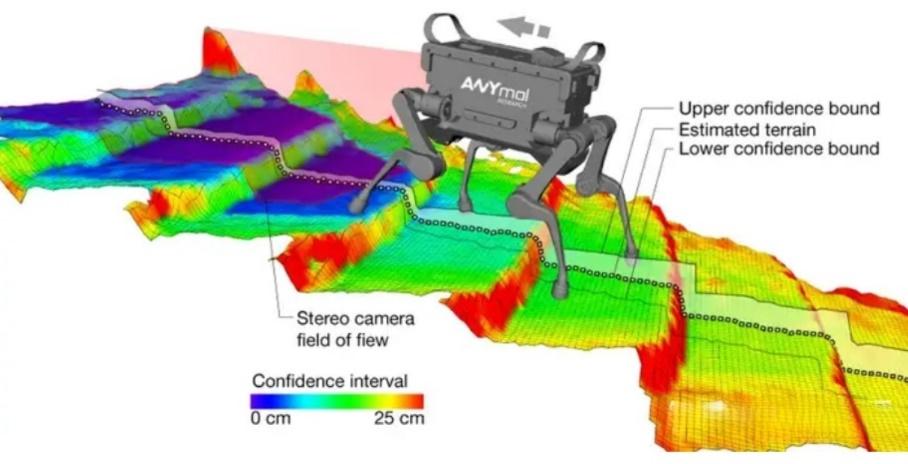
针对上述多模态感知融合技术一直也是四足机器人领域重点解决技术问题,比较有特点的技术方案同样采用雷达与视觉融合的技术路线,例如四足机器人上下楼梯就需要采用这样的技术方案构建环境高程地图信息,在除了完成避障外进一步实现对落足位置的选择,从而实现机器人高效的机动,因此可以看到多模态数据融合的感知技术方案对于高智能作业的机器人来说十分重要,如ETH Anymal机器人就可以构建稠密的高程占据地图完成在高度方向上的规划:
3、更高效精准、流畅的清扫路径规划——灵隙贴边技术
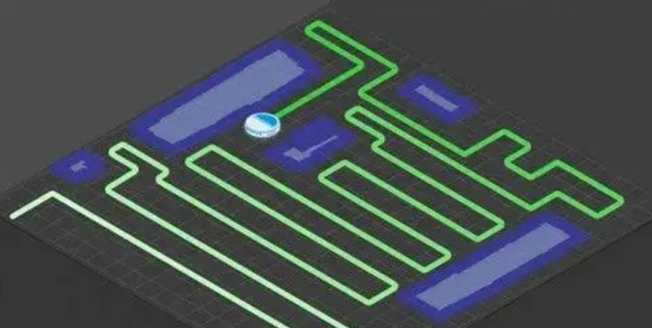
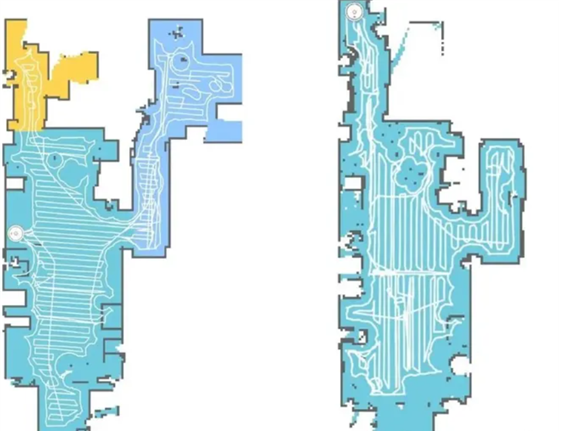
清扫机器人自主导航实际上除了需要机器人能完成避障绕行任务外,更重要的是要实现对整个房间的清扫,这需要规划合理的路径覆盖整个房间,如下图就是典型的扫地机器人路径规划图,可以看到机器人基于之前的占据地图完成了对各个房间的遍历,并且基于自身可以清扫的尺寸完成重复绕行。我测试了T30基站位于拥挤地形下的自主返航和回充功能,测试中T30均实现了对基站自主寻找并且可以快速可靠地进行回充,就算在我家猫咪干扰下也不会影响机器人的导航。通过观察APP中的清扫轨迹,更可以看到机器人在对移动障碍物自主绕行和整屋清扫轨迹的规划结果,总之就是看起来非常高级!
通过测试,T30在沿边清扫中运动非常连续,不会出现倒车或者其他问题,同时机械臂带动清扫机构恒定地验证墙边缘移动,特别是在直角转弯处机器人清扫机构虽然出现了绕行动作,但是最终的清扫轨迹仍然覆盖了整个直角边缘,要实现上述效果可以猜测机器人在运动规划中除了考虑机器人本身的运动轨迹外,还同时完成了对清扫机构轨迹的规划,完成清扫的实际仍然是机械臂末端作业机构,因此高级的轨迹规划是完成对清扫路径的规划,同时机体轨迹与之相协调,最终在实现机器人动态绕行避让,通过这三重组合实现高效、流程的整屋清扫。
除了上面的功能外,我还测试了APP快速建图、清扫任务智能编排等个性化功能,在APP上可以快速浏览机器人构建的地图,并且可以智能标注不同区域的清扫特点,整个机器人清扫路径也十分清楚,这个基本就和四足工业巡检机器人一样强大,对于做SLAM导航的工程师而言,相信看到在APP端能完成如此复杂的可视化交互与任务规划功能也会感到非常激动,后续如果能进一步连接大模型、远程遥操作,那除了扫地外,机器人真的就成为了智能家居小助手了!在APP中除了可以显示实时清扫过程还能转换为3D模式,在添加家居后基本可以和实际房间布局一模一样,并且T30可以针对不同家居和地毯定制多样化的清扫任务:

4、总结
家用扫地机器人已不是新鲜话题,似乎也成为了每个人的家居必备产品,在我们猜测其功能设计已达到饱和之时,厂家们还是“卷”无止尽,不断为机器人增加新的黑科技,不断给消费者带来新的惊喜。主动的作业机械臂把很多足式机器人或仿生机器人的创新技术集成在扫地机器人中,对于用户来说这无疑可以享受更好的、更惊喜的使用体验。我想未来随着人工智能技术的进一步赋能,像科沃斯T30这样优秀的扫地机器人不仅能完成清扫任务,还将承担家居监控、智能防盗、情感陪护等更多的责任,成为我们生活中不可或缺的得力助手。

 扫码下载APP
扫码下载APP
 科普中国APP
科普中国APP
 科普中国
科普中国
 科普中国
科普中国