

“萝卜快跑”问世的热潮迅速从武汉辐射到全国,为本就火热的智能驾驶话题再添了一把薪柴。然而,从小马智行到Apollo GO,再到如今的萝卜快跑,Robotaxi的概念早已不是新鲜事物,智能驾驶的课题也已经历了近一个世纪的浮沉。
早在1925年,美国发明家弗朗西尔·弗里曼Francis Houdina就展示了一辆通过无线电控制的汽车,这辆车能够在纽约市的街道上行驶,是自动驾驶技术的最初尝试之一。
进入20世纪60年代,达特茅斯学院的约翰·麦卡锡John McCarthy首次提出了“自动驾驶”概念,设想通过计算机来控制车辆,实现自主驾驶的目标。此后,智能驾驶技术逐步发展,尤其在1984年,美国国防高级研究计划署(DARPA)联合陆军启动了自主地面车辆(ALV)研究计划,这一计划为无人驾驶技术的研究奠定了基础。
人工技能的飞跃发展使得智能驾驶落地成为现实,智能驾驶的发展可以分为多个阶段。美国汽车工程师学会(SAE)将自动驾驶技术细分为六个级别,分别是无自动化(L0)、驾驶支持(L1)、部分自动化(L2)、有条件自动化(L3)、高度自动化(L4)和完全自动化(L5)。
在最低的L0级别下,车辆完全依赖传统驾驶员进行操作,所有驾驶任务都由驾驶员负责。而在L4和L5级别,车辆能够实现高度自动化驾驶,完成了从L4特定区域或条件的自主驾驶到L5级别在任何条件下自主驾驶,驾驶员完全不需要介入的“Mind Off”。

图 1 国内外无人驾驶技术发展历程
自动驾驶技术的实现依赖于三个核心环节:环境感知、决策规划和控制执行。环境感知、决策规划及控制执行是自动驾驶技术的三大核心环节。环境感知模块是自动驾驶的基础,实时获取周围环境的数据。在获取环境信息后,决策规划阶段的任务是分析和处理这些数据,以确定车辆的行驶策略。最后,控制执行模块负责将决策规划的结果转化为具体的驾驶操作。如同人类司机驾驶一样,先要通过观测知道路况信息,再进行分析进行驾驶决定,最后肢体执行大脑的决策信息驾驶汽车。
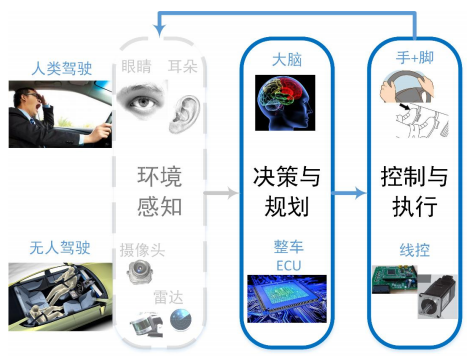
图 2 自动驾驶关键技术
环境感知技术是自动驾驶系统的核心组成部分,依赖于多种传感器来获取和理解车辆周围的环境信息。此外,基于视觉感知的技术通过计算机视觉技术对获取的图像进行分析,完成物体识别、目标检测、三维重建以及距离测量等任务。例如,图像目标检测技术能够识别和定位图像中的重要目标,如行人、车辆和交通标志;而图像语义分割技术不仅仅是标注目标位置,还能精确地描绘目标边缘,归类到不同的物体类别,提供详细的场景理解。

图 3 图像识别示意图
接下来到了行为决策与路径规划的关键环节,这一部分决定了车辆在复杂的交通环境中如何行动其中的一种方法是通过设定一个“效用函数”来评估不同决策的优劣,综合考虑了安全性、舒适性和效率等因素的效用函数决策,例如在遇到行人过马路时,系统会优先选择停下,因为这在效用函数中有更高的安全分数。
路径规划是决定车辆如何从一个点安全高效地到达另一个点的关键步骤,通常分为三个层次:道路级、车道级和行驶级。道路级规划是从起点到目的地的路径选择,类似于人们在导航系统中设定目的地。车道级规划是在确定了总体路径后,考虑到车道特性、交通标志和信号等因素,确保车辆在适当的车道上行驶,实现安全和流畅的交通流。行驶级规划则是涉及车辆的具体驾驶操作,如加速减速、变道和避障,实时响应周围的环境变化,处理突发情况。高效的路径规划,车辆能够确保行驶的流畅性和安全性,为乘客提供舒适的乘车体验。
控制执行则是要求车辆能够平稳且精准地跟踪规划好的轨迹,为了实现这一目标,系统通常应用自动控制理论,结合车辆的动力学和运动学约束,生成相应的控制指令。
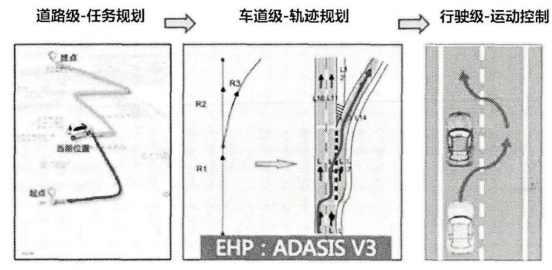
图 4 自动驾驶不同层次的路径规划
通过前文的介绍可以发现,传统的方法依赖多个工程模块的紧密协作,每个模块各司其职,环环相扣,缺一不可。然而,随着人工智能技术的迅猛发展,端到端智能驾驶技术或将承担重要的未来使命。它突破了模块化的局限,通过一个统一的神经网络系统将整个驾驶过程衔接。

图 5 技术分类
端到端技术在自动驾驶领域的实现依赖于深度学习模型,这犹如给汽车配备了一位经验丰富的“超级司机”,这位超级司机不仅能够根据眼前的路况做出反应,还能根据过去的经验预见即将发生的情况。所有的传感器——摄像头、激光雷达、毫米波雷达等——就是它的眼睛和耳朵,时刻捕捉周围环境的信息。而这些信息会被直接输入到“超级司机”的大脑中,通过大量数据的训练,模型会根据这些输入做出判断,并转化为具体的驾驶指令。
这种方法的优势在于它将整个驾驶过程整合为一个统一的系统,避免了传统方法中各模块之间可能出现的“信息脱节”现象。传统自动驾驶系统中的每个模块,就像是接力赛中的每一棒,必须无缝衔接才能确保整个过程的顺畅。而端到端技术则更像是一位全能运动员,从头到尾一气呵成,不再需要任何中间的传递。
在应用落地上不同的是,特斯拉的FSD v12通过深度学习模型直接从传感器数据中提取信息,而萝卜快跑项目则通过结合车端算法与遥控驾驶结合,具有安全保障与合理的应急处理方案。
进入2023年,我国自动驾驶政策重心逐步转向支持车型量产和商业化运营,加速高级别自动驾驶技术的成熟以及创新商业模式的发展。这一变化标志着政策方向从之前的鼓励扩大道路测试和试点范围,转向更实际的产业化推进。而Robotaxi无人驾驶出租车作为自动驾驶等级中的L4乃至更高级的市场应用,已经在多地开展了商业化运营试点。此外,作为城市道路的新生态,控制成本,运营服务,仍是市场落地亟需考虑的问题。
参考文献
吴琼.自动驾驶汽车变道决策与规划关键技术研究[D].中国科学技术大学,2022.
徐谦.面向复杂环境自动驾驶的视觉环境感知研究[D].吉林大学,2023.
刘潇.面向高速环境的自动驾驶车辆行为决策、规划与控制研究[D].浙江大学,2022.
2024年Robotaxi商业化趋势展望[J].上海汽车,2024,(04):1-3.
李洪硌.无人驾驶汽车高速工况智能决策、轨迹规划与跟踪研究[D].华南理工大学,2020.
苏建美.面向大场景的智能驾驶端到端算法研究[D].电子科技大学,2020.
文章由科普中国-创作培育计划出品,转载请注明来源。
作者:蔡文垂 中国科学院长春光学精密机械与物理研究所 研究生
审核:冯超 三一智矿科技有限公司 高级工程师


 扫码下载APP
扫码下载APP
 科普中国APP
科普中国APP
 科普中国
科普中国
 科普中国
科普中国