


从太空俯瞰到的空间站与机械臂
这个充满科技感的大家伙,就是目前我国自主研制智能程度最高、技术难度最大、系统最复杂的空间智能制造系统,机械臂。它既能像人的胳膊一样灵活转动,还能在空间站到处爬行。力气大,够灵活,颜值高,本领多,是航天员们出舱作业少不了的好帮手。
灵活的太空助手
空间机械臂是一种高度集成的机电系统,它融合了机械、电子、控制以及热管理等技术,本质上是一种智能机器人。根据安装位置,空间机械臂主要分为舱内型和舱外型两种。舱内机械臂因为要在狭小的空间里施展拳脚,所以它的身材和活动范围都有点受限,主要任务包括组装舱内的设备、更换部件、捕捉漂浮物体,还能帮忙做些科学实验之类的活儿。至于舱外机械臂,它们就厉害多了,根据不同的任务需求,有的长达几米,有的能伸展到十几米。主要工作包括辅助空间飞行器对接、捕获和释放太空目标、进行在轨服务和空间观测等。
中国的空间站核心舱机械臂是首个能在太空轨道上自主爬行的机械臂系统,它能够模仿人类手臂,通过“抓”“扭”“转”等方式,在各个方向上自由转动和抓取物体。其抓取能力可不能小觑,举起高达25吨的重物不在话下。同时,它还拥有七个自由度,使其活动范围极为广阔。除了手臂的灵活性,机械臂还配备了一双“慧眼”——视觉系统,以及类似于人类神经的触觉反馈系统。
机械臂的肩部和腕部各装有一个末端执行器,这些执行器能够像人的手一样,抓取并操纵轨道上的舱段或货物。当机械臂在舱体上移动时,也是通过这些末端执行器来捕捉并固定到舱段上的目标接收器。末端执行器上还装备了腕部相机,这些相机能够实时捕捉并传输舱外的图像,无论是空间站的表面情况,还是航天员的操作场景,都逃不过它的“法眼”。机械臂与舱体的连接,无论是在机械、电气还是信息层面,都依赖于这些末端执行器来实现。
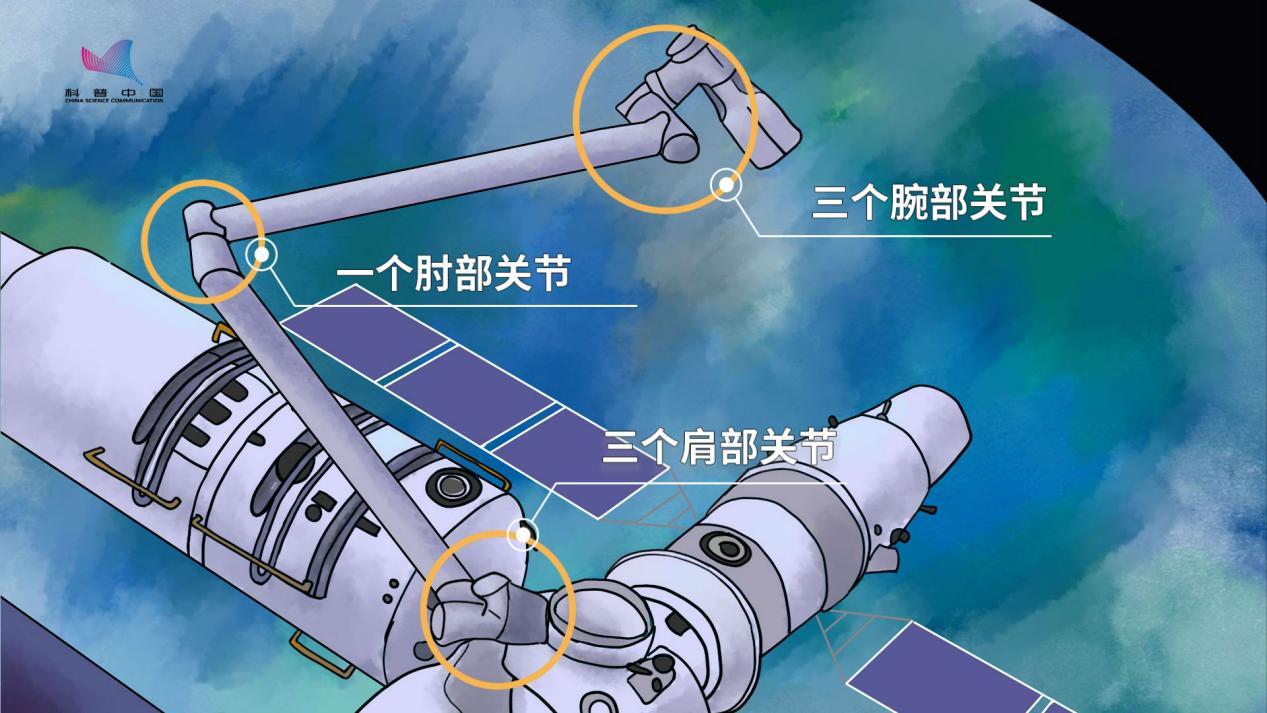
中国空间站机械臂结构示意图
多才又多艺的太空机械臂
机械臂在空间站的运营中扮演着关键角色,它的重要性体现在哪些方面呢?让我们一起来揭开它的神秘面纱!
首先,机械臂不仅是个大力士,还特别细心,既能扛起重重的物体,又能精确轻巧地把物体移动到正确的位置。空间站上的大型机械臂由两段臂杆组成,展开后的长度能达到10.2米,自身重量却只有0.74吨左右。这种设计让机械臂有着高负载自重比,轻轻松松就能把东西从一个地方挪到另一个地方,有效地辅助航天员进行舱外作业等任务。
提及到舱外作业,其主要任务通常涉及对航天器维护、设施的安装以及维修工作。由于穿戴重达一百二十公斤的太空服会大大妨碍航天员的行动能力,他们通常需要依靠机械臂来帮助自己在太空中移动以及进行精确的作业活动。这样的方式大大减轻了航天员的劳动强度。在当前的太空站上,机械臂不仅在协助航天员进行太空行走方面发挥了关键作用,还成功完成了包括全景相机的提升、太空站外部设备的组装以及核心舱太阳能电池阵列的修复试验等多项任务,显著增强了中国航天员执行太空任务的能力。
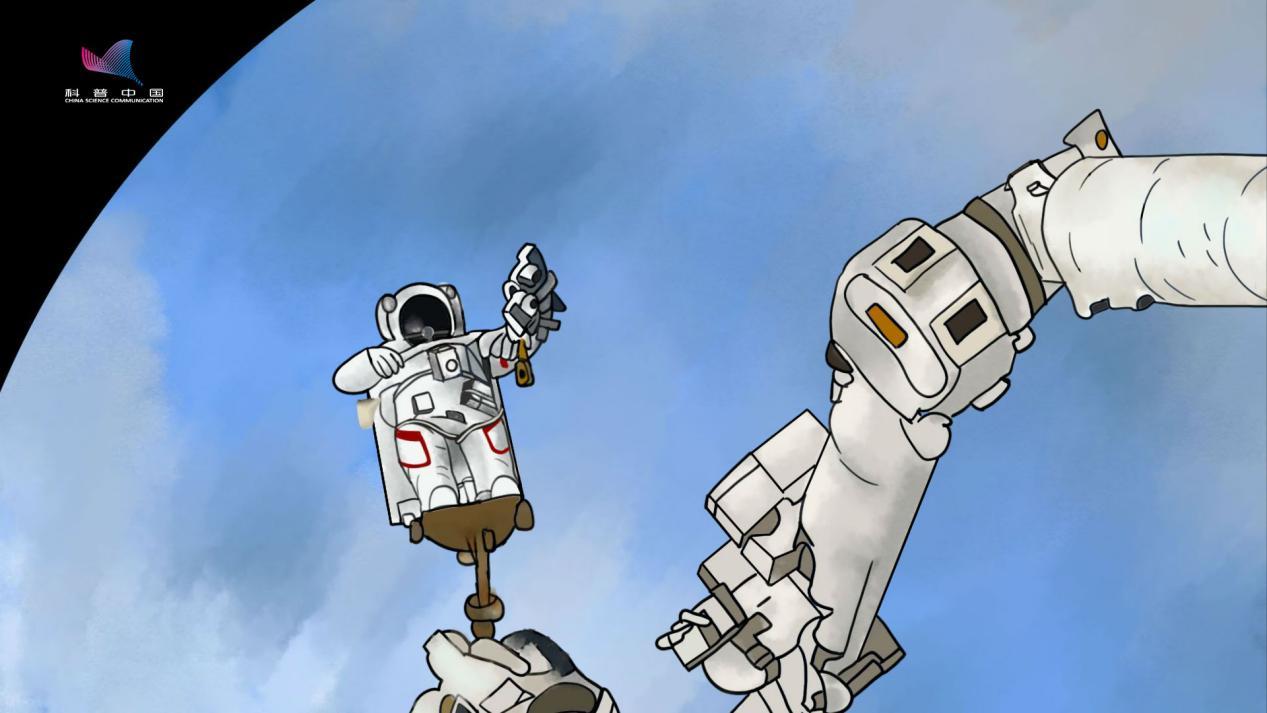
机械臂协助航天员进行舱外活动示意图
除了上述功能,机械臂还具备安全、精确地捕获和稳定悬停航天器的能力,这为后续的作业、维护或回收任务提供了坚实的基础。以即将发射并与空间站共轨飞行的“巡天”光学舱为例,当需要对它进行维护、部件更换或升级时,机械臂可以将其捕获并与空间站对接,从而方便航天员进行检查和维护工作。
大小机械臂:组合出击
空间站装备的两套机械臂,一大一小,它们各有专长,但也能互相搭把手。核心舱所配备的大型机械臂是我国首个旨在太空轨道上长期运作的机械臂。而在问天实验舱的气闸舱外侧,还悬挂着一套仅有5米长的小型机械臂。别看它个头小,但在定位精度与定姿精度上却是优于大机械臂的。它主要负责辅助航天员进行太空行走、对舱外设备进行状态监测、搬运及安装舱外物资、执行舱外养护维修、照料载荷以及维护光学设施等六项主要任务。
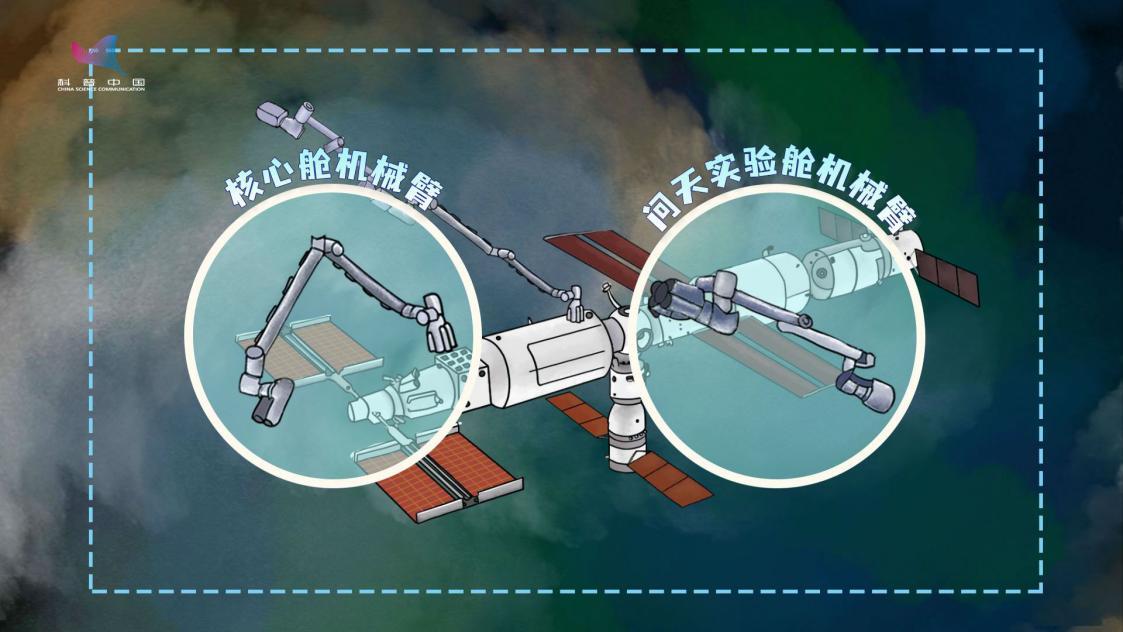
核心舱机械臂与问天实验舱机械臂示意图
大小机械臂不仅能各自单打独斗,还能通过一个特别的级联装置联手作战。在这个过程中,小机械臂能够被大机械臂捕获,形成一支长达15米的组合臂。这种组合不仅利用了大机械臂的长臂和高负载能力,也整合了小机械臂的灵活性和精确度,使得作业范围能够覆盖整个空间站的三个主要舱段。这套组合臂在中国空间站的天和、问天、梦天三个舱段之间灵活移动,其行动自如,宛如太空中的"机甲战士"。此外,空间站上的科学实验载荷也能通过机械臂被精确地放置到相应的标准接口位置,实现了"即插即用"的功能,这样一来,航天员就不需要再进行繁琐的舱外操作,省时又省力。
在神舟十四号航天员执行太空行走任务时,大小机械臂首次实现了协同作业,它们"合体"后能够将航天员安全地运送到空间站的任何指定位置,确保了各项出舱任务的顺利完成。在神舟十四号航天员的第二次太空行走中,大小机械臂已经成功地完成了级联测试,这不仅验证了机械臂组合体在舱外作业的能力,也为后续的太空任务提供了重要的技术支持和经验积累。
内容综合于中国载人航天工程网、央视网等
(科学性审核:陈钢,空间机器人技术教育部重点实验室副主任)

 扫码下载APP
扫码下载APP
 科普中国APP
科普中国APP
 科普中国
科普中国
 科普中国
科普中国