

水面舰船航行时后面会留下长长的航迹,这些航迹为气泡和海水的混合体,与周围的海水形成明显的差别,并且伴有声、磁、热、光、电导率等特性变化,这些航迹称为尾流。尾流长度远远大于舰艇长度,如以尾流为探测目标,则鱼雷发现目标变得较为容易。利用尾流特性检测目标的鱼雷自导就是尾流自导系统,当前主要是利用了尾流的声散射特性。
尾流自导属于循迹制导,通过检测舰船航行过后留下的尾迹来发现目标,并沿着尾流追踪目标,直至追上并命中目标。目前,在鱼雷上得到应用的主要是反水面舰艇的尾流自导,对于水面或潜望状态航行的潜艇也同样适用。在国际上,俄罗斯装备了众多型号的尾流自导鱼雷,技术成熟,是尾流自导鱼雷研制国家的典型代表。此外,美国也开发有尾流自导鱼雷。

水面舰艇航行留下很长、无法消除的尾迹
与声自导系统相比,尾流自导不受海洋水文条件的影响,特别是在浅海使用时比声自导优越得多,而且在攻击过程中不易被发现。舰艇的尾流既不易消除,也不易模拟,目前已有的人工干扰器材对尾流自导不起作用,因而抗干扰能力强,攻击成功率高。
根据接收处理的尾流信号是反射回来的,还是直接感应尾流特性的,将尾流自导分为主动尾流自导和被动尾流自导。
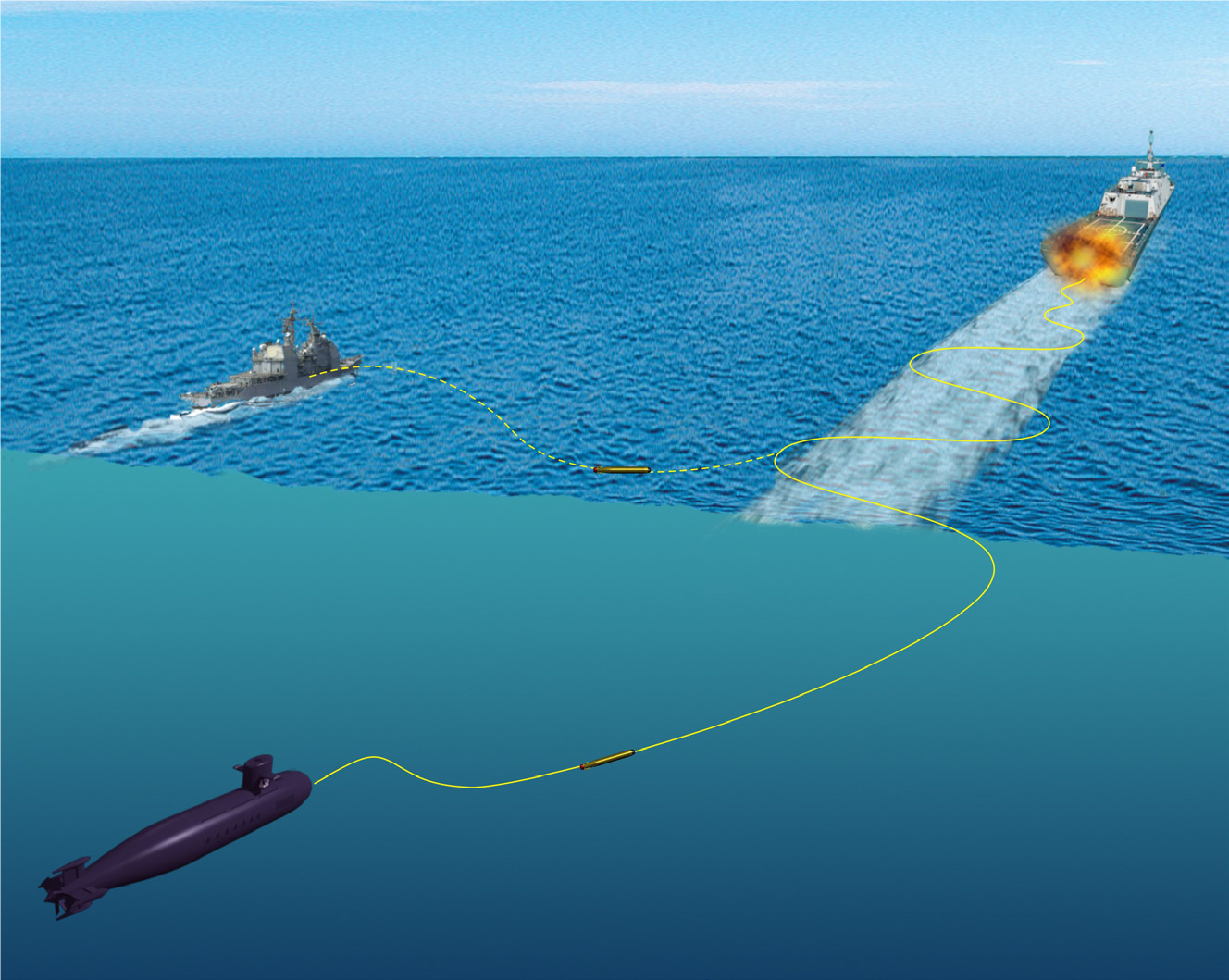
尾流自导鱼雷攻击弹道示意图
1. 主动尾流自导技术
主动尾流自导利用了尾流气泡对声信号的散射特性,通过检测尾流反射的声信号来检测尾流。它主要由声学基阵、发射机、接收机以及雷载计算机等组成。目前,世界上在役的尾流自导鱼雷基本上都是采用主动声尾流自导系统,如俄罗斯УГСТ 通用自导鱼雷、53-65K 鱼雷、美国MK45F-1 鱼雷等。此外,也有利用激光束探测尾流的主动尾流自导,但还处于研究阶段,未见到实际装备。
主动尾流自导的声学基阵一般布放在雷顶的上部,所形成的发射和接收波束均指向上方。尾流自导鱼雷发射出管后,沿预定的目标尾流区域定深直航,自导发射机通过声学基阵周期性地向海面发射探测声脉冲信号搜索尾流。当鱼雷从目标后方的尾流下面穿越时,探测声脉冲碰到海面的尾流层被反射回来。接收机对反射回来的尾流信号进行处理,检测出尾流信息。雷载计算机根据检测到的是否有尾流的信息确定导引弹道参数,并发出操舵指令,操纵鱼雷沿尾流跟踪目标,直至命中目标。
2.被动尾流自导技术
被动尾流自导本身不发射信号,而是利用声学传感器感知尾流区的声阻抗异常。当发现尾流后操纵鱼雷沿尾流跟踪目标,直至命中目标。被动尾流自导主要由换能器、接收机以及雷载计算机等组成。除了利用声阻抗异常探测尾流外,也有国家在开展利用尾流区电导率异常、磁异常等特征探测舰艇尾流的研究。
被动尾流自导的声学换能器通常安装在鱼雷最前端,以利于接触和感知尾流。由于传感器需要和尾流接触,因此鱼雷的航行深度相对较浅,以使传感器处于尾流之内。当尾流自导鱼雷发射出管后,鱼雷沿预定的目标尾流区域定深直航搜索,声学换能器感知水下声阻抗的变化。当换能器接触到尾流时,其阻抗参数发生变化,影响到接收机内平衡电路的工作状态。接收机通过判断平衡电路的状态来确认是否发现尾流。雷载计算机根据接收机给出的是否有尾流的信息确定导引弹道参数,并发出操舵指令,操纵鱼雷沿尾流跟踪目标,对目标实施攻击。(来源:国防科技大学“科普中国”共建基地)
 扫码下载APP
扫码下载APP
 科普中国APP
科普中国APP
 科普中国
科普中国
 科普中国
科普中国