

如果有一天,你需要搬着两桶水上下没有电梯的楼,你得做什么准备?游泳健身……不对,“肌肉布料”了解一下!
提到可穿戴机器人,你想到的肯定是“机甲战士”,走起路来咯吱咯吱。最近韩国机器研究院研发出的新材料一改钢筋铁骨,将可穿戴机器人化身为“肌肉布料”,你只需要穿上用这种布料制作的衣服,就能轻松低调地获得超人般的力量!

“肌肉布料”可以自主收缩、舒张,辅助用力丨KBS NEWS
肌肉布料,穿上就行
这种“肌肉布料”的出现,使穿戴机器人向着便宜轻便、易于穿戴的静音产品迈出了一大步:只要将它贴在衣服上,你就能瞬间变成大力士。
 通电使肌肉布料收缩与舒张丨KBS NEWS
通电使肌肉布料收缩与舒张丨KBS NEWS
“肌肉布料”不需要额外的发动机,人们通过通电加热即可调整它的工作状态。“肌肉布料”通过自身的收缩与舒张,分担操作者的受力,从而使操作者能够承受更大的力量,完成对重物的托举与搬运。成人手掌大小的肌肉布料,就可以辅助搬运10公斤的物品。
 6.6克的肌肉布料可以承载10千克的重物丨KBS NEWS
6.6克的肌肉布料可以承载10千克的重物丨KBS NEWS
这种布料并不是由一般的棉麻线组成,其中的“织物”是形状记忆合金。这种记忆合金直径仅20微米,常温下是舒展状态,通电加热后就会收缩。通过控制布料形态,可以模拟真实肌肉的舒张与收缩。同时,肌肉布料里面还有用于测量温度和测量收缩长度的传感器,用来向控制系统反馈肌肉布料的实时状态。
 形状记忆合金线缆,常温下保持舒展,受热后收缩成弹簧状丨engineerguy/Youtube
形状记忆合金线缆,常温下保持舒展,受热后收缩成弹簧状丨engineerguy/Youtube
这并不是形状记忆合金第一次被用在可穿戴设备上,2019年,韩国机器研究院就进行了一次尝试。研究人员设计了一套服装,将形状记忆合金以插件的形式内嵌到服装的臂筒上,从而形成服装型可穿戴机器人(STWR, Suit-type Wearable Robot)。
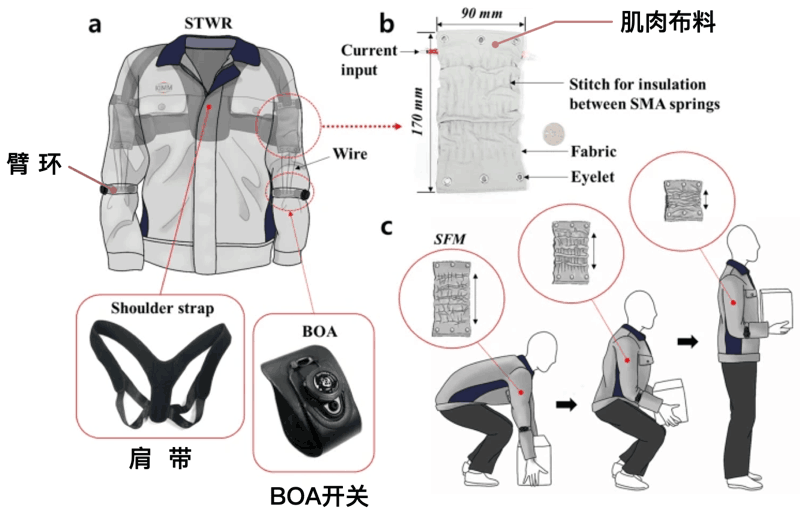 新型服装式可穿戴机器人STWR原理图丨参考文献[3]
新型服装式可穿戴机器人STWR原理图丨参考文献[3]
服装型可穿戴机器人方便易用。打开开关,肌肉布料受热收缩带动手臂,辅助穿戴者搬运重物;搬运过程中保持肌肉布料的供电就可使其维持稳定收缩状态;搬运结束后关闭开关,自然冷却即可使布料变为舒张状态。
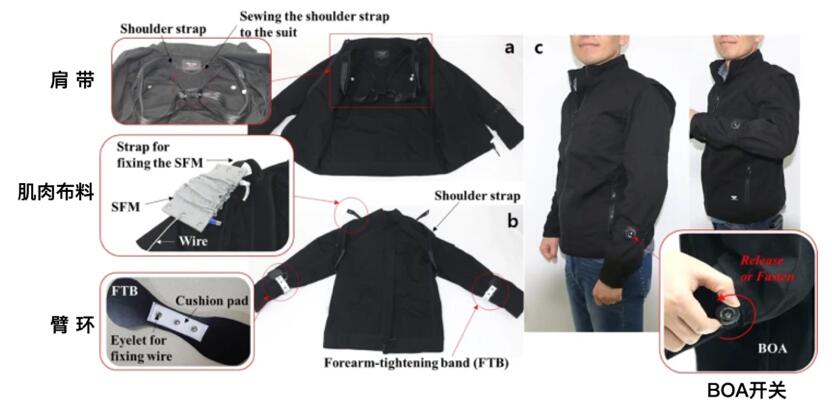 新型服装式可穿戴机器人STWR实物图丨参考文献[3]
新型服装式可穿戴机器人STWR实物图丨参考文献[3]
服装型可穿戴机器人有两种工作模式:搬运模式和普通模式。普通模式并不会为你提供额外力量。需要使用时可以旋转开关,快速实现搬运模式的切换。搬运模式下,两块肌肉布料最大可产生200牛的牵引力,功率为300瓦,可让穿戴者毫不费力地举起20公斤重的物品。
可穿戴机器人:软硬都不能少
如此看来,笨拙的“铠甲式”机器人好像分分钟就可以被“肌肉布料”代替。其实在不同的使用场景中,孰强孰弱还真不好说。
科幻电影里炫酷的动能装甲,有着硬朗的外形和机械结构,这种力大无穷但稍显笨拙的铁骨铜臂,也是早期进入大众视线的硬式可穿戴机器人,因为骨骼的形态也被称为外骨骼机器人。

法国研发出一款Atalante外骨骼机器人,主要用于下肢康复,辅助患者站立或行走。穿戴者可以左右晃动和弯腰捡东西。
外骨骼机器人有着软型机器人难以替代的优势。首先,丰富的技术积累使其产品化程度较高,已在不同场合有了广泛的应用。同时,外骨骼机器人材料的刚性较高,可以承受更多的重量,负载能力更强,续航能力也更强。在工厂流水线和物流搬运等场合,对效率要求较高,而对外观和佩戴舒适度要求较低,此时外骨骼机器人相对来说更能胜任。
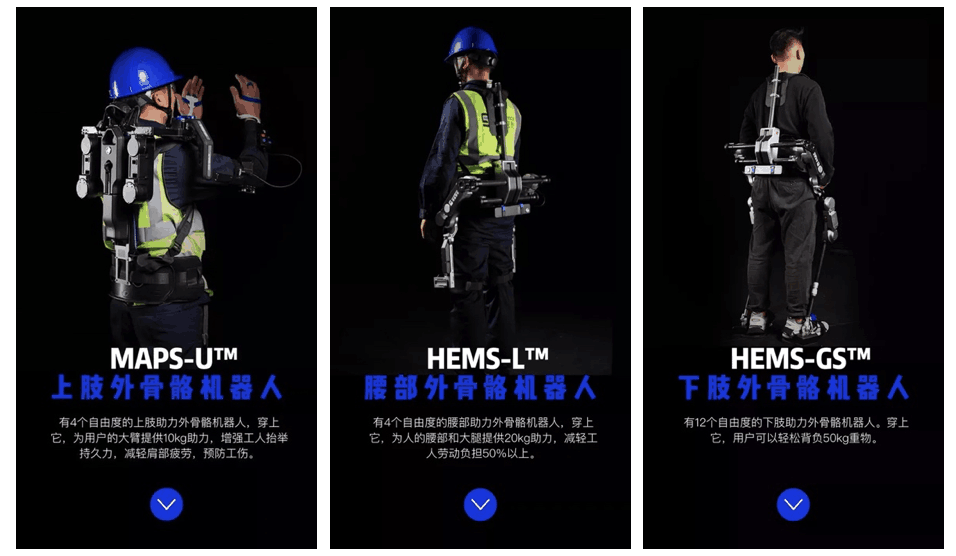 不同功能的外骨骼机器人丨ulsrobotics
不同功能的外骨骼机器人丨ulsrobotics
但外骨骼机器人产品还达不到“穿戴无感”的程度,穿戴者需要忍受重量和噪音带来的痛苦。
类似蜘蛛侠战衣一样的肌肉布料,是软式可穿戴机器人的代表。软式可穿戴机器人轻便柔软,使用时更加舒适,无感化程度更高。因为其很高的灵活性,在某些场合能很好地贴合身体以提供良好的体验。
 哈佛大学的研究团队曾推出了一款类似手套的可穿戴康复软体机器人,其中使用了人造气动肌肉,可以辅助人们进行康复训练。丨National Science Foundation/Youtube
哈佛大学的研究团队曾推出了一款类似手套的可穿戴康复软体机器人,其中使用了人造气动肌肉,可以辅助人们进行康复训练。丨National Science Foundation/Youtube
外骨骼可穿戴机器人出现的时候,人们惊叹于“未来已来”,如今“肌肉布料”的出现,也立刻引发了种种讨论,人们大胆揣摩放飞想象的翅膀:“使用肌肉ATP供能”、“利用重力进行储能”、“基于人体工程学的原理利用人体肌肉拮抗进行储能”……
这让我想到《赛博朋克2077》。在夜之城自由驰骋的我时常幻想,植入义体是否会成为趋势,仿生人又会不会成为新的物种?
技术的发展是循序渐进的,肌肉布料也是在现有技术的基础上,创造性的融合不同领域的技术研发出来的。相信在未来,会有越来越多轻便易用的可穿戴设备从实验室走向大众。血肉苦弱,机械飞升,今天的肌肉布料,会不会成为我们走向全民义体化赛博朋克未来的第一步呢?
参考文献
1.Gopura, R. A. R. C., Bandara, D. S. V., Kiguchi, K. & Mann, G. K. Developments in hardware systems of active upper-limb exoskeleton robots: A review. Robot. Auton. Syst. 75, 203–220 (2016).
2.Polygerinos, P. et al. Towards a soft pneumatic glove for hand rehabilitation. IEEE International Conference on Intelligent Robots and Systems, Tokyo, Japan, https://doi.org/10.1109/IROS.2013.6696549 (2013, Nov. 3–7) (2013).
3.Park, S.J., Park, C.H. Suit-type Wearable Robot Powered by Shape-memory-alloy-based Fabric Muscle. Sci Rep 9, 9157 (2019). https://doi.org/10.1038/s41598-019-45722-x
4.杨建楠,黄彬,谷小军,王骏,张亚辉,朱继宏,张卫红.形状记忆合金力学行为与应用综述[J/OL].固体力学学报:1-41[2021-05-18].https://doi.org/10.19636/j.cnki.cjsm42-1250/o3.2021.028.
5.郭良,张修庆.金属基形状记忆合金研究进展[J].功能材料与器件学报,2020,26(05):323-330.
作者:Smile
编辑:Owl、窗敲雨
 扫码下载APP
扫码下载APP
 科普中国APP
科普中国APP
 科普中国
科普中国
 科普中国
科普中国