|
解密Uber自动驾驶:多重传感器保护为何撞死人?凤凰网科技 2018-03-20 |
据科技博客TechCrunch北京时间3月20日报道,Uber自动驾驶汽车在周一撞死了一位行人。这是首例自动驾驶汽车撞人致死事故,关注度肯定会超过以往自动驾驶汽车事故。然而,从表面上看,除了整体系统出现故障外,很难理解为何会发生这样的致死事故,因为自动驾驶汽车在设计时就是为了防止这样的事故发生。
意外进入行驶路径的人或物几乎是自动驾驶汽车工程师首先考虑的突发事件。这种情况有很多,例如突然停下来的汽车、一只鹿、过路的行人。工程师在设计自动驾驶系统时会尽早发现他们,确认并采取适当措施,可能会减速、停车、迂回等。
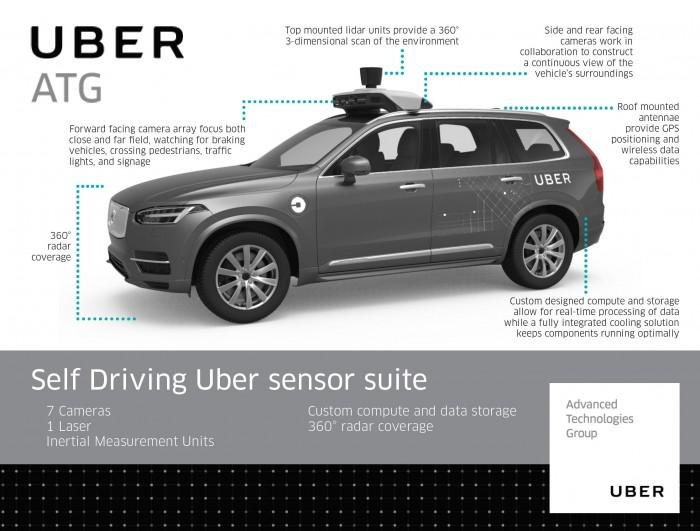
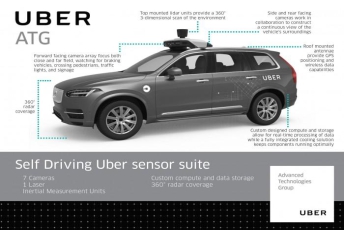
Uber自动驾驶汽车配备了一整套传感器
Uber自动驾驶汽车配备了多个不同的成像系统,它们既可以执行普通任务(监控附近汽车、标记和车道线),也可以执行特殊任务,例如上述让汽车减速等措施。在这起事故中,能够拯救受害者的图像系统应该不少于四个。
顶部激光雷达
这个位于汽车顶部的桶状物体就是激光雷达系统,它能够以每秒多次的速度生成汽车周围的3D成像。激光雷达使用了红外激光脉冲,遇到物体后会反弹,返回到传感器,从而在白天或晚上相当细致地侦测静止和移动的物体。
大雪和浓雾会让激光雷达的激光器变得模糊,准确性会随着距离的变长而降低,但是在几英尺到几百英尺内,顶部激光雷达依旧是非常重要的成像工具,几乎存在于每辆自动驾驶汽车上。
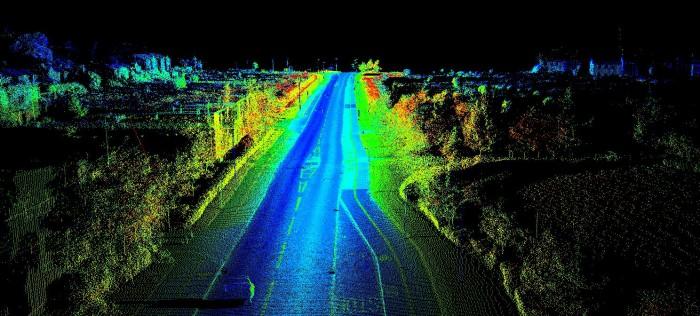
激光雷达生成的影像
如果顶部激光雷达单元运行正常,在没有被完全遮挡的情况下,它应该能够分辨出受害者。同时,汽车距离行人还有100多英尺远(30多米),可以把行人成像传送给“大脑”进行核对。
前端雷达
和激光雷达一样,雷达发出信号,等待它弹回,但使用的是无线电波,而不是激光。这使得雷达具有更强的抗干扰能力,因为无线电可以穿透雪和雾,但是也会降低分辨率,改变其距离像。
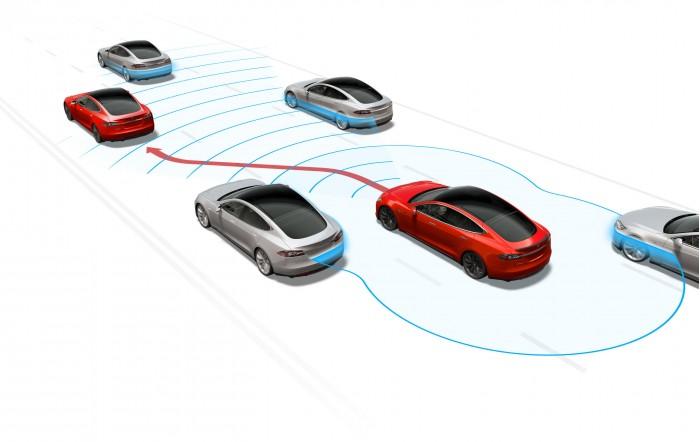
特斯拉自动驾驶系统Autopilot主要依赖雷达
根据Uber部署的雷达数量不同,它所提供的距离像可能存在巨大差异。Uber很可能在汽车前后部署了多个雷达,以实现360度无死角覆盖。如果Uber是为了给激光雷达提供补充,那么雷达与激光雷达的成像可能会存在大幅重叠,但是更多雷达可以用于侦测其他车辆和更大型障碍物。
短焦和长焦光学相机
激光雷达和雷达易于确定物体的形状,但并不擅长读取标记,理解物体颜色等。这个任务就交给了可见光相机,它内置了精密的计算机视觉算法,能够对成像进行实时分析。
Uber自动驾驶汽车上的这些相机密切关注标志着汽车刹车(突然亮红灯)、交通灯以及穿越十字路口行人的指示器标记。汽车前端尤其会使用多角度、多种类型的相机,这样才能获取汽车前进道路的完整图像。
侦测行人是工程师们试图解决的最常见问题之一,这种算法已经非常成熟。这一过程通常被称作“分割”图像,一般还会涉及标记、树木、人行动等。
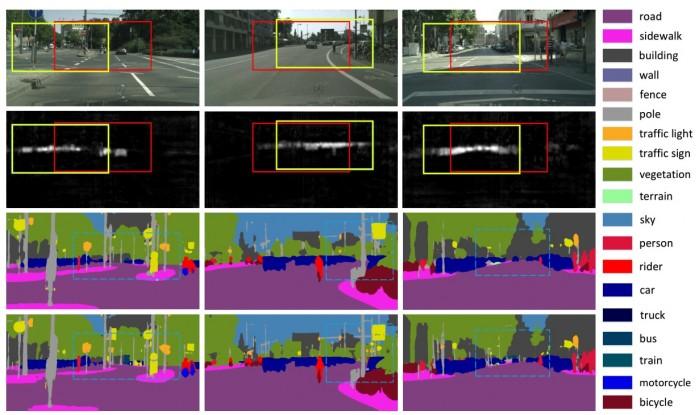
光学相机拍摄的图像
对于相机来说,夜间工作很困难,这是一个显而易见的问题。不过,这个问题交给前两个系统来解决,激光雷达和雷达能够在夜间工作。即便是在伸手不见五指的环境下,穿着全黑衣服的人也能够被激光雷达和雷达识别。随后,这些雷达就会向汽车发出警告,应该减速或者通过汽车大灯确认行人。这可能就是自动驾驶汽车通常没有夜间视觉系统的原因。
安全司机
人类很擅长发现障碍物,即便是人眼没有激光器。人类的反应时间不是最好的,但是汽车不会作出反应或者作出错误反应,经过训练的安全司机会作出正确反应。
值得指出的是,自动驾驶汽车中还有一个中央计算单元,它能够收集各个传感器提供的信息,然后生成一个更加完整的汽车周围环境成像。
目前还不清楚这起悲剧发生时的具体情况,但是Uber自动驾驶汽车肯定配备了本可以侦测到行人的技术,本可以让汽车作出正确反应。而且,就算一个系统失效,另一个系统也应该能够发挥作用。
随着Uber、当地执法部门、联邦机构对这起事故的调查,更多细节将会披露出来。
责任编辑:王超
 科普中国APP
科普中国APP
 科普中国微信
科普中国微信
 科普中国微博
科普中国微博







最新文章
-
为何太阳系所有行星都在同一平面上旋转?
新浪科技 2021-09-29
-
我国学者揭示早期宇宙星际间重元素起源之谜
中国科学报 2021-09-29
-
比“胖五”更能扛!我国新一代载人运载火箭要来了
科技日报 2021-09-29
-
5G演进已开始,6G研究正进行
光明日报 2021-09-28
-
“早期暗能量”或让宇宙年轻10亿岁
科技日报 2021-09-28
-
5G、大数据、人工智能,看看现代交通的创新元素
新华网 2021-09-28




