机器人DIY,你也可以科普中国-科普融合创作与传播 2017-12-18 |
2015世界机器人大会已经成功闭幕机器人成了这几天最火热的词汇之一。
时至当下,机器人早已在不知不觉中走进了千家万户,大到可以照顾老人的陪护机器人,小到机器人吸尘器,甚至电影《超能陆战队》中憨态可掬、呆萌至极的“大白”那样的健康机器人顾问也是存在的。
在享受机器人技术带来的福利同时,恐怕不少人同时也有着一个自儿时起就有的梦想——制作一个属于自己的小机器人。

图1 《超能陆战队》剧照
其实,以如今科技的发展,这样的想法是不难实现的。直接购买可组装的机器人是一种简单便利的捷径,但是这样机器人往往限制就比较多,而且需要另外的程序设定。
若要随心所欲地制作机器人,3D打印的开源项目是另一种不错的尝试,不过其对于动手能力和编程水准就有着更高的要求。一般人可以遵从着指导说明来完成一个机器人的制作,但如果要在此基础上继续发挥就有难度了。那么有没一种更加简便的机器人制作方法呢?答案是有的,这就是另一种简洁的机器人制作手段——BEAM机器人。
BEAM机器人一般译作仿生机器人,开头的英文字母并不是“光柱”的意思,而是由4个英文单词Biology、Electronics、Aesthetics、Mechanics的首字母组合而成,翻成中文分别是“仿生”“电子”“美学”和“机械”,BEAM机器人就是结合了这些技术的要点而制作出来的机器人。
早在1988年,Mark Tilden就提出了BEAM机器人的概念,并制作出了第1台基于此概念的机器人。其初衷是为了仿照生物的一些生理结构或是动作行为来简化控制过程,并以此作为设计思路来制作出了一种包含控制元件的电路,这种电路被称为神经元。这种控制方法可以模拟生物的应激过程,神经元使用的是电路开关,从而避免了制作相应的程序。

图2 Mark Tilden
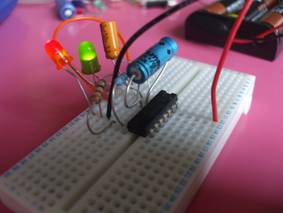
图3 一块神经元电路
随着技术的发展,普通人也越来越容易制作机器人了。随着这种思路逐渐被大众所接受,BEAM机器人也就逐渐形成了一种公认的规范,目前大家所公认的基本要求有以下3点:
1.尽可能使用最少的电子元件;
2.采用回收材料以及废料来制作;
3.使用辐射能作为动力来源(大多数情况下就是太阳能)。
由此可见,BEAM机器人非常适合那些有想法有创意却苦于自己没有编程方面特长的人群,基本上只要懂焊接,并具备基本的动手能力,都可以在这种理念下做出属于自己的BEAM机器人。
神经元电路入门——太阳能引擎
虽然BEAM机器人的原理简单,而且少了编程这一环节,但是电路上的工夫还是要下的。而且也因为少了编程,控制方面就必须由电路开关来接替。虽然所用电子元件不多,但是电路上的基本知识和一些技巧还是必须要有的。BEAM机器人的神经元电路有着很多巧妙的设计,需要大家在不断学习和摸索中逐渐领会,这里就以BEAM机器人的一个入门级经典电路——太阳能引擎作为例子,让大家先熟悉电路的制作。
太阳能引擎是多数BEAM机器人的心脏设备,它为机器人提供动力。传统太阳能引擎的电力输出往往不尽如人意,于是BEAM机器人的爱好者Ben Hitchcock在此基础上改进出了一个效率更高的引擎。这个太阳能引擎可以给出一个电脉冲到电机上,从而驱动电机运动,也可以将电机改成其他设备来达到不同的需求。作为最基本的神经元电路单位,可以在此基础上做出各种机器人作品。
由于不同类型的机器人受其体积和功能的影响,这里的电子元件不需要都焊在电路板上,可以根据实际情况巧妙布局和连线,这就要考验大家的想象力以及动手能力了。
BEAM机器人实例——太阳能蟋蟀机器人的制作
学会了制作太阳能引擎,就可以在此基础上制作一些机器人了。
这里将介绍一个相对简单的作品——太阳能蟋蟀机器人的制作方法。太阳能蟋蟀机器人及其衍生的作品是网络上最多的BEAM机器人种类,不仅小巧有趣也相对容易制作,简单的结构以及一定的扩展空间是其吸引爱好者们的关键。

图4 太阳能蟋蟀机器人
制作这个太阳能蟋蟀机器人需要如下材料,可自行采购:
NPN型小功率三极管×2、PNP型小功率三极管×2、单闪LED(配黑色热缩管)×2、10kΩ多圈电位器×1、微型电机(4V以下大小适当就好,但功率不要太小)×2只、3.3kΩ/0.25W电阻×2、33kΩ/0.25W电阻×2、1μF/50V电解电容×2、3300μF/10V电解电容×1、太阳能电池(不低于4V)×1。另外还需要结构基座的制作材料和若干长度的双色单芯导线一段。
准备这些材料后,就可以开始制作蟋蟀机器人了。
首先是制作结构基座,用来连接电力部分和驱动部分。这里使用废电源插座里拆出的一块铜片,改装成一个基座,中间部分是用来连接3300μF储能电容,两边的卡箍是用来固定电机的。结构件可用的材料随意性比较大,可以使用任何手边能找到的可用材料,只要能满足需求即可。

图5 基座的制作
基座完成后,把3300μF储能电容的负极焊在基座中间的部分,注意负极引脚留出一段不要剪掉,用来连接控制用的电子部分。在两边卡箍里套进两只微型电机,电机轴向下。储能电容的顶部着地,与两只电机轴形成三点支撑。通过改变两只电机之间的夹角,可以微调机器人跑动的速度。而调整电容与电机夹角度,可以调节机器人的重心。这样机器人的基础结构部分就做好了。
太阳能蟋蟀的驱动控制是由4只三极管构成,用以提供稳定的脉冲电流,它们组成了机器人的“心脏”。制作这类小机器人的技巧就是首先完成核心部分的制作,其他元件将围绕着这个核心环环相扣地进行搭建,这样整体结构就显得紧凑。把4只三极管管脚朝上两两并列,上方是两只PNP型三极管,NPN型三极管在下面。这里使用的三极管是2N3906和2N3904,如果用其他型号的管子替换,需要仔细核对管脚顺序是否与图中一致。
接下来先焊接下方的两只NPN型三极管。把两只管子的发射极向外展开,左侧管子的发射极向斜下方弯折,与右侧管子的发射极焊接在一起。用镊子把相应三极管的引脚弯折到指定位置。注意在弯折引脚时,距离根部留出1-2mm距离,防止引脚折断。然后继续焊接上方的两只PNP型三极管。把两只管子中间的基极向外展开,右侧管子的发射极向斜上方弯折,与左侧管子的发射极焊在一起。最后把4只管子焊接在一起,分别连接好左右两侧管子的集电极和基极。
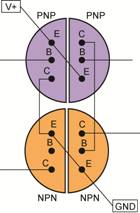
图6. 4只三极管的排列与连接
完成“心脏”部分的制作后就要开始向外面焊接其他元件。把两只1μF电容的正极弯成如图所示的形状,分别与上方PNP管子向外展开的基极焊接在一起。然后把两只3.3kΩ电阻一端打个弯,套在1μF电容的正极上,另一端折成90°直角,向外展开。在两侧1μF电容的负极,各焊接上一只33kΩ电阻。电阻的另一端与3.3kΩ电阻的直角和NPN型管子向外展开的集电极焊接在一起。
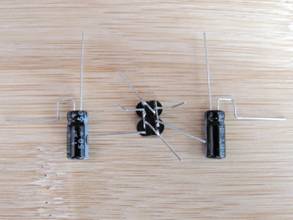
图7

图8

图9

图10
为了精确的控制两只电机的运转,可以加入一只调零元件。这里使用了一只10kΩ多圈电位器作为一个分压器,串联在两部引擎的单闪LED负极与地之间。电位器的作用是调节引擎的触发导通的时间,最佳的情形是两部引擎同时触发。因为蟋蟀体积小、重量轻,两只电机同时运转,就可以带动整部机器人“跳跃”着前进。把多圈电位器中间的管脚与NPN型三极管的发射极焊接在一起,两侧的管脚向外展开成直角。

图11
接下来焊接上两只单闪LED。LED负极焊接在多圈电位器两侧展开的管脚上,正极焊接在1μF电容的负极一端。把LED的引脚留出一定长度,为的是在总装以后弯折出一个艺术造型。

图12
再把电子部分的地端和储能电容预留好的负极焊接在一起。储能电容的正极贯穿过4只三极管,与两只PNP管发射极预留好的V+焊接在一起。为了防止短路,要给电容正极套上一段绝缘管。使用导线把两只微型电机连接到电路中,注意左右电机的正负极不要搞错,否则机器人运动的方向是反的。最后安装上太阳能电池再做一些修饰就大功告成了。

图13
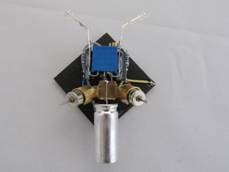
图14
这个太阳能蟋蟀的电路比较简单,而且不涉及编程,只用到17个电子元件和1个结构件,对于新手来说是一个不错的练手尝试。
虽然这个作品不算很智能,与机器人大会上那些效果酷炫、甚至和真人相似的高级机器人相差很远,但自己制作,毕竟是迈出了第一步。等你学会更高深的电路和编程知识后,就可以将学到的东西自由发挥,做出真正属于自己的机器人了,说不定某天你的作品也会登上世界机器人大会的舞台。
怎么样,不来尝试一下吗?
责任编辑:科普云
上一篇:机器人如何感知世界?
下一篇:终会与我们朝夕相处的人工智能
 科普中国APP
科普中国APP
 科普中国微信
科普中国微信
 科普中国微博
科普中国微博







最新文章
-
为何太阳系所有行星都在同一平面上旋转?
新浪科技 2021-09-29
-
我国学者揭示早期宇宙星际间重元素起源之谜
中国科学报 2021-09-29
-
比“胖五”更能扛!我国新一代载人运载火箭要来了
科技日报 2021-09-29
-
5G演进已开始,6G研究正进行
光明日报 2021-09-28
-
“早期暗能量”或让宇宙年轻10亿岁
科技日报 2021-09-28
-
5G、大数据、人工智能,看看现代交通的创新元素
新华网 2021-09-28




