
|
受壁虎启发 柔性机器人抓手可进行一些繁重的工作cnBeta.COM 2018-04-11 |
机器人研究的一个特别活跃的领域涉及柔性部件的探索。无论是人造肌肉还是用于抓取物体的抓手等,这些更具延展性的部件都为人类开辟了新的可能性,并使机器更安全。现在,机器人正从壁虎令人惊叹的粘合特性中获得帮助,结合形成机器人抓手,抓取的物体重量远远超过其本身。

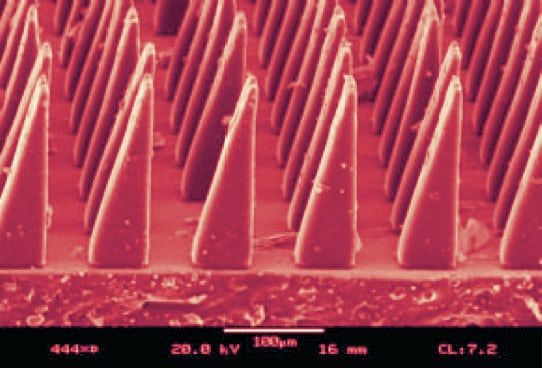
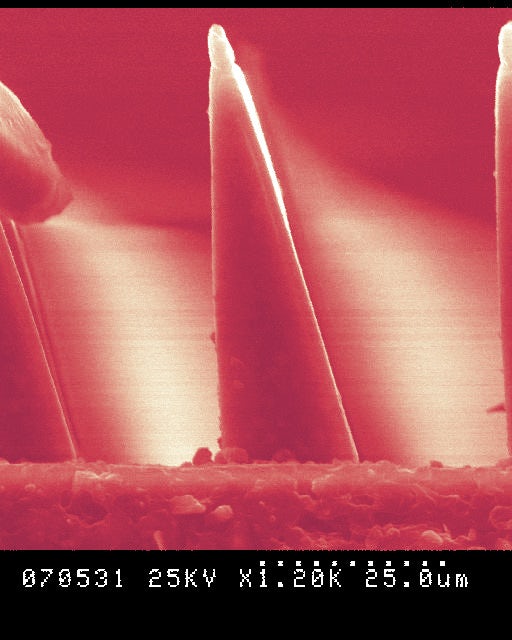
来自斯坦福大学、加州大学圣地亚哥分校(UCSD)和美国宇航局喷气推进实验室(JPL)的研究人员现在已经使用光刻技术开发了一种合成材料,该材料模仿壁虎的自然抓握能力,并可用于涂覆柔性机器人抓手。


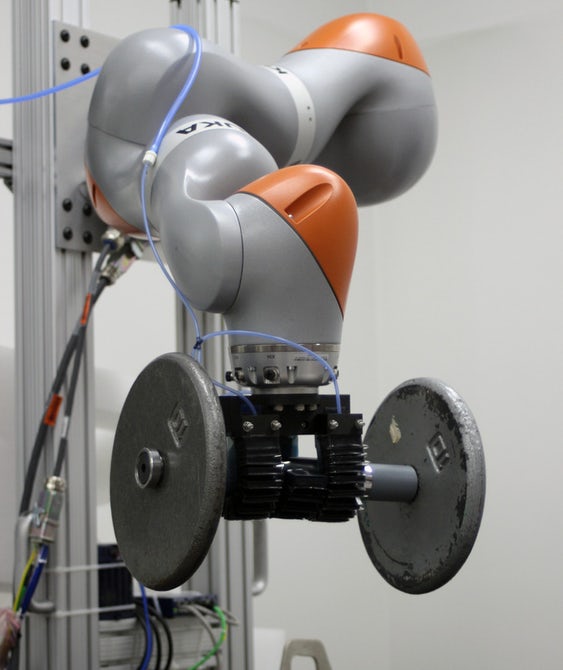
这种3D打印的系统利用可伸缩硅胶在抓手中嵌入高强度织物,可以弯曲,但在处理较重负载时不会伸长变形。与此同时,抓手牢固地固定在基座上,形成柔性和坚硬材料的混合物,使抓手既能适应不同形状的物体,又能承受较大的力量。

而且由于受壁虎启发的分子反应在更大的表面积上更有效地发生,所以材料的性质对于符合不同形状物体的柔性机器人抓手而言是特别有效的涂层,因为这意味着具有更大的表面积。

通过开发控制算法,机器人可以沿着抓手的整个长度分配适量的力,团队最终可以使用一个抓取器抓取各种不同位置的重物,重量不超过45磅(20千克)。这包括粗糙的多孔物体,如火山岩、圆柱形管道等更平滑的物体,以及咖啡杯和西红柿等常见物品。
“我们意识到,这两个组件,柔性机器人技术和壁虎粘合剂相得益彰,”UCSD Bioinspired机器人与设计实验室的第一作者兼博士生Paul Glick说道。
Glick和他的同事们计划进一步开发真正利用粘合剂的算法,同时也探索抓手在零重力环境和太空操作中的潜力。
责任编辑:杨茗
 科普中国APP
科普中国APP
 科普中国微信
科普中国微信
 科普中国微博
科普中国微博







最新文章
-
为何太阳系所有行星都在同一平面上旋转?
新浪科技 2021-09-29
-
我国学者揭示早期宇宙星际间重元素起源之谜
中国科学报 2021-09-29
-
比“胖五”更能扛!我国新一代载人运载火箭要来了
科技日报 2021-09-29
-
5G演进已开始,6G研究正进行
光明日报 2021-09-28
-
“早期暗能量”或让宇宙年轻10亿岁
科技日报 2021-09-28
-
5G、大数据、人工智能,看看现代交通的创新元素
新华网 2021-09-28




