航天员“抡手臂”就能转身,没胳膊的卫星咋办?
来源:科普中国-科普融合创作与传播 作者: 时间:2022/03/23
出品:科普中国
制作:徐鹏晖 (中国科学院国家空间科学中心)
监制:中国科学院计算机网络信息中心
2021年12月9日,“太空教师”翟志刚、王亚平、叶光富在中国空间站为广大青少年带来了一场精彩的太空科普课,这也是时隔8年之后我国航天员再度进行太空授课。
三位航天员演示了太空转身、水球开花等实验,向我们展示了微重力环境下航天员们奇特生活方式的冰山一角。

太空授课直播现场
(图片来源:新华社B站)
太空转身为什么这么难?都是角动量在作怪
为何在地面上看起来如此平常的转身动作,在太空中做起来却如此困难呢?
这其实是角动量守恒原理的作用。角动量是描述物体转动的一个参量,一般来说,物体质量越大、转速越快、转动半径越大,角动量越大。而角动量守恒是指一个物体在转动时,如果不受外力作用或者外力总扭转作用为0,则角动量保持不变。
当人在太空中处于漂浮状态时,在初始角动量为0(也就是静止不旋转)的情况下,如果不借助任何外部物体,是无法靠扭动身体转起来的。航天员叶光富在实验中的尝试已经证明了这一点,而在地面上的我们则可以通过向地面借力的方法使自己转起来。

航天员叶光富在太空转身实验中尝试通过转动上半身让自己旋转起来,但失败了
(图片来源:新华社B站)
在这次尝试中有一个细节,叶光富在试图转动上半身时,下半身会自动往相反的方向转。这是因为上半身转起来时会产生一个角动量,而下半身会自动产生一个方向相反的角动量,抵消上半身转动产生的角动量以实现守恒。但在此之后,由于腰椎和腰部肌肉的限制,上半身没法继续转动了(毕竟人没办法让上半身和下半身分离然后让它们各自转),尝试就此失败。
这给我们提供了一个新思路,我们只需要寻找身体上能自由全角度转动的部位,然后让它转起来提供一个角动量,那么身体主体就会产生一个相反的角动量从而转起来。所以后来叶光富成功通过抡手臂的方式实现了转身(同理你也可以尝试抡大腿画圆,不过那可能操作难度太大)。

航天员叶光富尝试抡右手手臂,成功实现转身
(图片来源:新华社B站)
面临“转身”问题的除了航天员,还有它们
需要解决“转身”问题的,除了航天员,还有在太空中飞行的卫星。它们和航天员们的情况类似,在没有其他东西可以依靠的环境下,卫星如何才能实现自主转向?这个时候,从上次太空授课讲述的陀螺定轴性衍生而来的单自旋稳定就显得不够用了。
单自旋稳定是早期人造卫星采用的一种姿控方式,它通过直接让卫星整体自转的方法保持卫星姿态稳定。但随着太空任务内容的扩展,面对需要对地球定向以及高精度定向的需求时,单自旋稳定的姿控方式就有些力不从心。
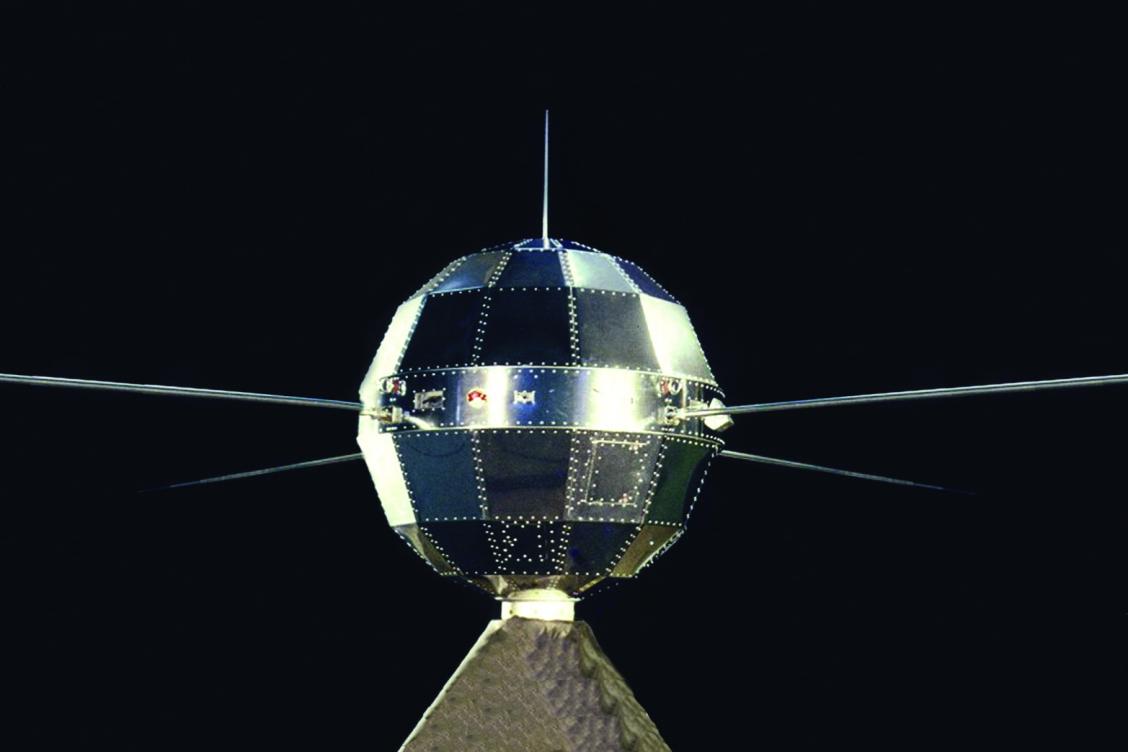
东方红一号卫星就采用单自旋稳定作为姿控方式
(图片来源:中国航天博物馆)
办法总比困难多,科学家们很快就想出了双自旋稳定这种姿态控制方式。人体的限制让我们没法上半身和下半身分开转,但卫星是人造的嘛,我们可以把卫星变成“上下半身分离的”,这样问题不就解决了?
卫星被分为平台和转子两个部分,两者之间通过轴承连接。需要定向的载荷被放置在平台上,而卫星的其他辅助系统则放在转子中。工作时,转子自身是旋转的,而平台则通过电机进行反向转动,由此实现消旋。这种姿控方式一般在通信卫星上比较常见,卫星搭载的通讯天线可以通过双自旋稳定实现对地定向。
风云二号卫星采用的是双自旋稳定
(图片来源:国家卫星气象中心)
双自旋稳定不是长久之计,还是得靠“抡手臂”
虽然双自旋稳定很好使,但时间久了它的弊端也就暴露出来了。由于平台相对较小,可安装的载荷也较少。除此以外,采用双自旋稳定的卫星,其太阳能电池只能贴在卫星表面安装,太阳能利用效率低,卫星功率低。看来这个“转身”方法并不是最优解,于是科学家们又想出了新点子。
和抡手臂同理,我们只需要一个能转起来提供角动量的部件代替原来庞大的转子,就可以让平台作为主体部分受控旋转。这就是固定偏置动量三轴稳定姿控的原理。采用这种姿控方式的卫星,其内部安装有一个偏置动量轮。工作时,动量轮保持旋转,“持有”一定角动量,卫星平台可根据需要与动量轮交换角动量,就像航天员调整抡手臂的速度以调整自己身体的转速一样,实现对地球或其他天体的定向和其他姿控要求。
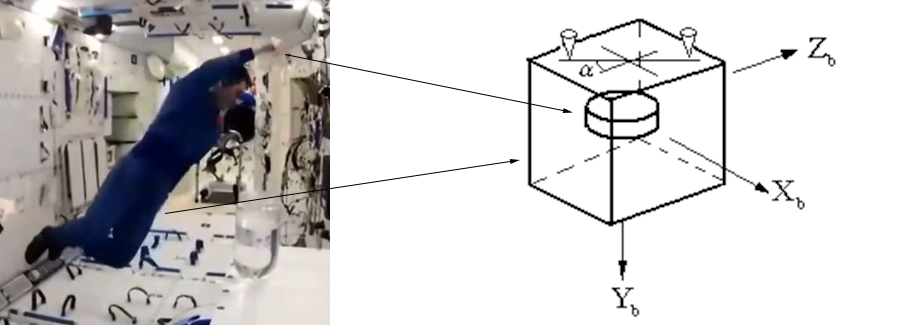
动量轮的作用和手臂类似,通过和主体交换角动量达到控制姿态的目的,只不过手臂在体外,而动量轮可以收到卫星平台体内
(图片来源:作者结合视频截图制作)
这个方法还能进一步扩展:我们可以增加动量轮的数量并将它们合理布局,使卫星在任意三维方向上产生“自由”大小的角动量以供旋转定向和姿控。这种方法大大提升了控制精度,卫星也变得更加灵活,因此被广泛用于各种卫星的姿控分系统。
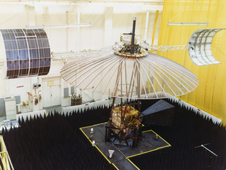
ATS-6卫星是第一颗使用“三轴稳定”姿控方式的卫星
(图片来源:NASA)
在太空微重力环境下,很多在地面上看起来习以为常的事情都会呈现不一样的面貌。哪怕是“转身”这样看似不起眼的小事,也蕴含着和卫星姿控相关的基本原理。
相信太空中还有很多隐藏在“习以为常”外表下的未知,等待着我们去发现和探索。
致谢 :
感谢中国科学院国家空间科学中心复杂航天系统电子信息技术院重点实验室高东副研究员对本文的科学审核。
参考文献:
[1] 包妙琴. 我国自旋稳定通信卫星四种发展方案的比较[J]. 中国空间科学技术, 1992(02): 30–37.
[2] 李卿. 中国静止气象卫星进展[J]. 航天返回与遥感, 2001(01): 13–19.
[3] 吕建婷, 马广富, 宋斌. 偏置动量轮控卫星姿态控制[J]. 控制工程, 2007(06): 569-571+575.
[4] 章仁为. 卫星轨道姿态动力学与控制[M]. 1 版. 北京: 北京航空航天大学出版社, 1998.
 科普中国APP
科普中国APP
 科普中国
科普中国
 科普中国
科普中国




