

使用二次型性能指标的线性系统最优控制。
定义使用二次型性能指标的线性系统最优控制。它可得到状态线性反馈的最优控制规律,便于实现闭环最优控制,是应用广泛的最优控制方式。
性能指标线性系统状态方程及输出方程为
x(t)=A(t)x(t)+B(t)u(t) (1)
y(t)=C(t)x(t) (2)
式中x(t)为n维状态向量;u(t)为p维控制向量;y(t)为q维输出向量。设z(t)为理想输出向量,与y(t)同维数,并定义
e(t)=z(t)-y(t) (3)
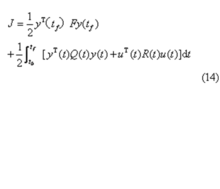
误差向量。线性二次型最优控制问题的性能指标为

这里,权函数F、Q(t)为正半定矩阵,R(t)为正定矩阵。假设tf固定。要求寻找最优控制u*(t),使性能指标J为最小。被积函数的第一项表明误差e(t)的大小,是非负的。其第二项表明控制功率的大小,对应于u≠0它恒为正。因此,对u(t)往往不需再加约束,而常设u(t)为自由的。性能指标的第一项则表示终值误差。
状态调节器问题系统状态方程如式 (1)所示,u(t)不受约束,tf固定,性能指标为

寻找最优控制u*(t),使性能指标J为最小。
用极小值原理或动态规划法,可得下列矩阵黎卡提微分方程(一阶非线性微分方程)
P(t)=-P(t)A(t)-AT(t)P(t)+P(t)B(t)R-1(t)BT(t)P(t)-Q(t) (6)
其边界条件为
P(tf)=F (7)
由式(6)解出P(t)后,可得最优控制规律为
u*(t)=-R-1(t)BT(t)P(t)x*(t) (8)
由式(8)可以看出,最优控制规律是一个状态线性反馈规律,控制向量u*(t)由状态向量x*(t)生成,构成状态反馈,并且呈线性关系。这样,能方便地实现闭环最优控制,这一点在工程上具有十分重要的意义。
P(t)是一对称矩阵,一般都要由计算机求出方程(6)的数值解。P(t)是时间函数,即使线性系统是定常的,为了实现最优控制,反馈增益应该是时变的,而不是常值反馈增益。这一点与经典控制方法的结论有本质的差别。1
可以求得性能指标的最小值为
tf=∞时的状态调节器问题 定常系统方程为
x(t)=Ax(t)+Bu(t) (10)
这里,A、B为常值矩阵,u(t)不受约束,性能指标为
Q、R为常值矩阵,Q为正半定的,R为正定的。求最优控制u*(t),使性能指标J为最小。
对于这样的系统,有(t)=0情况下的矩阵黎卡提方程
上式是矩阵黎卡提代数方程,它是非线性方程。求解该方程,可得最优控制为
性能指标的最小值也由式(9)求得。
输出调节器问题 系统动态方程为式(1)、(2),u(t)不受约束,tf固定,性能指标为
式中F和Q(t)为正半定矩阵;R(t)为正定矩阵。求最优控制u*(t),使性能指标J为最小。
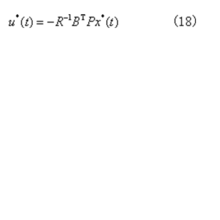
可将这类问题转化成等效的状态调节器问题,得:当且仅当系统完全可观测时,存在唯一的最优控制

其中,P(t)满足下列矩阵黎卡提方程
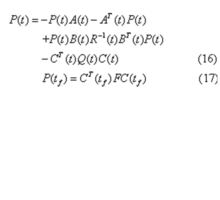
最优控制规律输出调节器的最优控制规律,并不是输出量y(t)的线性反馈,而仍是状态x(t)的线性反馈。仅由输出反馈时,没有充分利用全部信息,不能构成最优控制。2
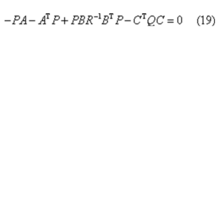
完全可控、可观测的定常系统,tf=∞时的输出调节器问题,其最优控制存在并且是唯一的
P为下列矩阵黎卡提代数方程的解
跟踪问题系统动态方程为式(1)、(2),x(t0)=x0,系统完全可观测,理想输出为z(t),误差向量为式(3),性能指标为式(4),u(t)不受约束,tf固定,求最优控制u*(t),使性能指标J为最小。
用极小值原理来求解,并设
λ*(t)=P(t)x*(t)-g(t) (20)
可写出形如式(16)的黎卡提方程以及下式
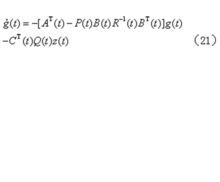
其边界条件为
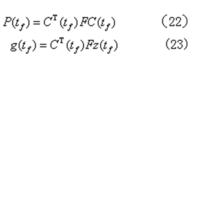
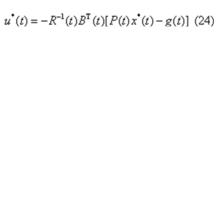
从而得最优控制规律
对于线性定常系统,当理想输出z(t)为常值、终端时刻tf极大但不为无穷大时,可以导出一个近似的最优控制规律如下,它具有很大的实用意义。
设系统状态方程如式(10)所示,x(t0)=x0,输出方程y(t)=Cx(t),系统完全可控并完全可观测,理想输出z(t)=z0,tf足够大,性能指标为

则其最优控制存在并唯一,为
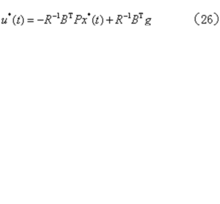
其中P和g依次满足下列两式
本词条内容贡献者为:
曹慧慧 - 副教授 - 中国矿业大学

 扫码下载APP
扫码下载APP
 科普中国APP
科普中国APP
 科普中国
科普中国
 科普中国
科普中国