

卡尔曼分解(Kalman decomposition)是控制理论中的数学工具,可以将线性时不变(LTI)控制系统转变为可以清楚区分系统可观测及可控制成分的系统。分解后的系统会有更清楚的结构,更容易可以对系统可到达及可观测子空间的特性下结论。
简介卡尔曼分解(Kalman decomposition)是控制理论中的数学工具,可以将线性时不变(LTI)控制系统转变为可以清楚区分系统可观测及可控制成分的系统。分解后的系统会有更清楚的结构,更容易可以对系统可到达及可观测子空间的特性下结论。1
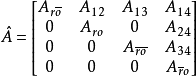
标准型利用可控制性及可观察性的结果,可以证明转换后的系统 有以下形式的矩阵:
有以下形式的矩阵:



因此可得以下结论:
子系统 具有可到达性及可观察性。
具有可到达性及可观察性。
子系统 有可到达性。
有可到达性。
子系统 有可观察性。1
有可观察性。1
相关条目可观测性
可控制性
本词条内容贡献者为:
王宁 - 副教授 - 西南大学

 扫码下载APP
扫码下载APP
 科普中国APP
科普中国APP
 科普中国
科普中国
 科普中国
科普中国