

派克变换(也译作帕克变换,英语:Park's Transformation),是目前分析同步电动机运行最常用的一种坐标变换,由美国工程师派克(R.H.Park)在1929年提出。派克变换将定子的a,b,c三相电流投影到随着转子旋转的直轴(d轴),交轴(q轴)与垂直于dq平面的零轴(0轴)上去,从而实现了对定子电感矩阵的对角化,对同步电动机的运行分析起到了简化作用。
介绍从数学意义上讲,park变换没有什么,只是一个坐标变换而已,从abc坐标变换到dq0坐标,ua,ub,uc,ia,ib,ic,磁链a,磁链b,磁链c这些量都变换到dq0坐标中,如果有需要可以逆变换回来。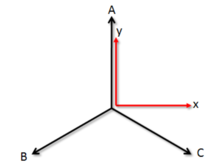
从物理意义上讲,park变换就是将ia,ib,ic电流在α、β轴上的投影,等效到d,q轴上,将定子上的电流都等效到直轴和交轴上去。对于稳态来说,这么一等效之后,iq,id正好就是一个常数了。
从观察者的角度来说,我们的观察点已经从定子转移到转子上去,我们不再关心定子三个绕组所产生的旋转磁场,而是关心这个等效之后的直轴和交轴所产生的旋转磁场了。这样做使得在建立转子回路电磁关系的微分方程时,其系数矩阵成为常数矩阵,而不是随着时间和空间量变化的系数矩阵,这样大大化简了分析发电机、电动机的电磁关系的微分方程。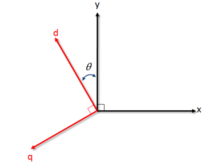
匀速圆周转动的情况下,派克变换就是通过一定的角度旋转变换,把旋转中的向量变为静止直角坐标系里面的量,即将空间静止坐标系代替旋转坐标系。
定义派克正变换:

逆变换:

派克变换也作用在定子电压与定子绕组磁链上:
用派克变换化简同步发电机基本方程变换后的磁链方程磁链方程:

上式中的电感系数矩阵 事实上都含有随时间变化的角度参数,使得方程求解困难。
事实上都含有随时间变化的角度参数,使得方程求解困难。
现对等式两边同时左乘 ,其中
,其中 为三阶单位矩阵。方程化为:
为三阶单位矩阵。方程化为:


其中  。
。
① 变换后的电感系数都变为常数,可以假想dd绕组,qq绕组是固定在转子上的,相对转子静止。
② 派克变换阵对定子自感矩阵 起到了对角化的作用,并消去了其中的角度变量。
起到了对角化的作用,并消去了其中的角度变量。 为其特征根。
为其特征根。
③ 变换后定子和转子间的互感系数不对称,这是由于派克变换的矩阵不是正交矩阵。
④  为直轴同步电感系数,其值相当于当励磁绕组开路,定子合成磁势产生单纯直轴磁场时,任意一相定子绕组的自感系数1。
为直轴同步电感系数,其值相当于当励磁绕组开路,定子合成磁势产生单纯直轴磁场时,任意一相定子绕组的自感系数1。
变换后的电压方程电压方程:

现对等式两边同时左乘 ,其中
,其中 为三阶单位矩阵。方程化为:
为三阶单位矩阵。方程化为:

由 ,
,
对两边求导,得 ,
,
所以
其中 ,令
,令
于是有
上式右边第一项为绕组电阻的压降,第二项为变压器电势,第三项为发电机电势或旋转电势。
本词条内容贡献者为:
李华青 - 副教授 - 西南大学电子信息工程学院

 扫码下载APP
扫码下载APP
 科普中国APP
科普中国APP
 科普中国
科普中国
 科普中国
科普中国