

突变约定(catastrophe convention)是突变理论的一个基本概念,是用来确定在两个或多个平衡位置中的选择准则。设f:M×U→R为一突变模型的势函数,在点u∈U的一个局部系是f|M×{u}→R的一个局部极小点,一个过程是一个可微映射s:U′→M,满足s(u)是一个局部系或-∞,u∈U′,U′是U的开稠密集,一个突变约定是指定一个过程于势函数f,最基本的约定有两种:麦克斯韦约定和完全延迟约定1。
基本介绍突变理论适用于梯度系统,但这时该系统需处于静态或准静态,没有考虑到动力学效应和涨落(系统的状态在平衡位置附近的微小变动)的影响。于是严格来说,根本就不可能实现从一个平衡位置到另一个平衡位置的转换,因为要进行转换需要某种形式的运动。因此,我们要约定这种转换在一定的条件下是可能产生的,并且约定转换进行的方式。
值得指出的是,虽然一个经典的确定性系统(例如势能为 的一维谐振子)可以用势的极小点
的一维谐振子)可以用势的极小点 完整地描述,但是一个量子力学谐振子的状态却需要用一个中心点在a的概率分布来描述,这个分布的宽度取决于Schrodinger方程中扩散项的系数。对于这类系统,必须注意涨落水平与势垒高度的相对大小。
完整地描述,但是一个量子力学谐振子的状态却需要用一个中心点在a的概率分布来描述,这个分布的宽度取决于Schrodinger方程中扩散项的系数。对于这类系统,必须注意涨落水平与势垒高度的相对大小。
考虑用势函数 描写的系统,这个系统原来处于势函数的一个全局极小点,当参数t变化时,势函数的形状会有所变动,原来的全局极小点可能转化为一个局部极小点而不再是全局极小点,也可能消失。我们需要作某种约定来确定系统在新的势函数下所处的位置,最常用的约定有两种2:
描写的系统,这个系统原来处于势函数的一个全局极小点,当参数t变化时,势函数的形状会有所变动,原来的全局极小点可能转化为一个局部极小点而不再是全局极小点,也可能消失。我们需要作某种约定来确定系统在新的势函数下所处的位置,最常用的约定有两种2:
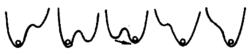
(1)Maxwell约定。系统总是转移到使它的势全局极小的稳定平衡位置。对于参数空间U中的u,当 有两个以上的稳定极小值时,s(u)总是选取绝对极小值(即极小值中之最小者),因此,突变仅出现在势函数有两个以上的绝对极小值时(如图1)1。
有两个以上的稳定极小值时,s(u)总是选取绝对极小值(即极小值中之最小者),因此,突变仅出现在势函数有两个以上的绝对极小值时(如图1)1。
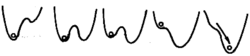
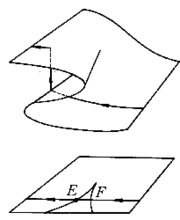
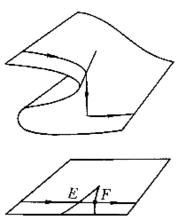
(2)理想延迟约定。也称完全延迟约定,系统留在原来的稳定平衡位置上,直到这个稳定平衡位置消失。当控制参数u在U中变化时,过程s(u)总是尽可能久地连续延伸,直到“无路可走”时为止(如图2),此时稳定的平衡状态消失在一个退化的临界点,从而使得势fu有退化临界点的u的轨迹起着重要的作用,在齐曼突变机械中,当自由端P在(u,v)平面上移动,从尖点形区域的右方进入而从左方穿出时(如图3),在点E处(而不是在点F)引起状态曲面M上相应轨迹的跳跃,自由端P移动的轨迹反向移动,从尖点形的左方穿入,从右方穿出(如图4),相应的M上的过程轨迹不在点E而是在点F处引起突变,这便是“使过程尽可能连续保持”的原则1。
不同突变约定的选用对于梯度动力学系统
当所有的 时,采用理想延迟约定比较合理,因为位势变化缓慢,系统无从得知其他极小点的情况。但是对于用分布函数描述的系统,它是否趋于全局极小点。则取决于势垒高度
时,采用理想延迟约定比较合理,因为位势变化缓慢,系统无从得知其他极小点的情况。但是对于用分布函数描述的系统,它是否趋于全局极小点。则取决于势垒高度 与涨落水平N的相对大小。当
与涨落水平N的相对大小。当 时。应采用理想延迟约定,而当
时。应采用理想延迟约定,而当 时,应采用Maxwell约定(图5)。因此,这两种约定可以被看作两种极限情况。
时,应采用Maxwell约定(图5)。因此,这两种约定可以被看作两种极限情况。
 :理想延迟约定;
:理想延迟约定; :Maxwell约定。
:Maxwell约定。
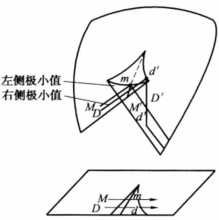
采用不同约定时的分叉集当然也不相同,采用理想延迟约定时的分叉集取决于 这个局部条件,称为局部分叉集,如我们前面所讨论的。而采用Maxwell约定时的分叉集由Clausius-Clapeyron方程确定,称为非局部分叉集。图6示出了对尖点突变的两种分叉集,以及参数变化时系统状态的轨迹。其中D(d)记理想延迟约定,M(m)记Maxwell约定。但实际情况也可能介于这两种极限状况之间,这时分叉集是一个模糊集。
这个局部条件,称为局部分叉集,如我们前面所讨论的。而采用Maxwell约定时的分叉集由Clausius-Clapeyron方程确定,称为非局部分叉集。图6示出了对尖点突变的两种分叉集,以及参数变化时系统状态的轨迹。其中D(d)记理想延迟约定,M(m)记Maxwell约定。但实际情况也可能介于这两种极限状况之间,这时分叉集是一个模糊集。
这两种约定都没有考虑动力学效应,下面的例子说明了动力学效应的影响。考虑阻尼振子
 其中
其中 ,并且
,并且

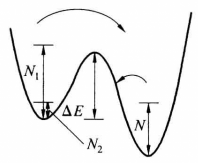
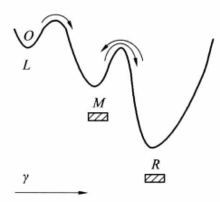
设V(x)的图形如图7所示,原来有三个稳定平衡位置,系统处于左面的稳定平衡位置。当参数变化时,这个平衡位置消失,根据理想延迟约定,系统将进入另一个稳定平衡位置。但究竟是哪一项呢?如果采用
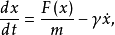 那么可以认为系统将静止在中间的平衡位置(
那么可以认为系统将静止在中间的平衡位置( )上,因为这里速度为零。但对于式(2)控制的系统,其最终位置实际上取决于γ值的大小和各稳定平衡位置的分布情况。这个问题可以通过对吸引域的形状考虑来加以解决,图3中给出了只考虑γ变化时的示意定性结果,γ越小,交替越频繁。
)上,因为这里速度为零。但对于式(2)控制的系统,其最终位置实际上取决于γ值的大小和各稳定平衡位置的分布情况。这个问题可以通过对吸引域的形状考虑来加以解决,图3中给出了只考虑γ变化时的示意定性结果,γ越小,交替越频繁。
在突变理论的大多数应用中都选用理想延迟约定,并且不考虑动力学效应2。
本词条内容贡献者为:
孙和军 - 副教授 - 南京理工大学

 扫码下载APP
扫码下载APP
 科普中国APP
科普中国APP
 科普中国
科普中国
 科普中国
科普中国