

伺服驱动系统中,假定检测器的误差是零,负载停止在零状态。在这种状态下,如果相反地对驱动电动机输出轴加负载力矩,停止位置也就随之发生变化,若加的负载力矩超过驱动电动机可输出的转矩,则将无限的变位。若取消负载,系统又回到原来的停止点。因此,伺服机构的驱动电动机为了得到输出转矩,必须有某种程度的旋转变位。这样,伺服机构带有弹资那样的性质。我们把这种特性叫做伺服刚度或者叫做转矩增益(位置回路增益和转矩常数的积)。1
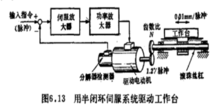
伺服刚度引起的失动如果考虑把这样的驱动电动机和工作台机构结合使用的情况,若工作台的滑动面上有摩擦,由于它在定位停止点成为驱动电动机的负载力矩,所以驱动电动机不得不停在离指令值稍前一点的转角位置上。也就是说,指令位置和机械位置离开少许。这种现象就是由伺服刚度引起的失动。1
 另外,以一定速度进给时,虽然产生取决于速度回路增益的固定偏差,但是,如果再加上动摩擦等外部负载,则只与伺服刚度所引起的固定偏差相加即可,若这些负载随着移动而变动时,则就会产生所谓进给不均匀的现象。1
另外,以一定速度进给时,虽然产生取决于速度回路增益的固定偏差,但是,如果再加上动摩擦等外部负载,则只与伺服刚度所引起的固定偏差相加即可,若这些负载随着移动而变动时,则就会产生所谓进给不均匀的现象。1
伺服刚度和机械刚度的失动量伺服驱动系统,除有纯粹的齿隙外,还有由于机刚度和伺服刚度所产生的失灵区。我们将包含这种失灵区和齿隙叫做失动。如果把这个驱动系统换成弹簧一质量系,则如图所示,成为两个刚度串联。因此,它们的刚度总和Kr0和失动量的总和△r0可用下式表示。2
失动量的总和
 伺服系统的失动量
伺服系统的失动量
 机械系统的失动量
机械系统的失动量
 式中F:负荷力。
式中F:负荷力。
Ke:机械系统综合刚度。
Ks:伺服刚度。
Kro:刚度的总和。
本词条内容贡献者为:
李航 - 副教授 - 西南大学

 扫码下载APP
扫码下载APP
 科普中国APP
科普中国APP
 科普中国
科普中国
 科普中国
科普中国