

磁阻位移测量是近年来发展起来的一种新型位移传感器,它是利用磁敏电阻随磁场强度大小的变化而引起阻值的改变来实现位移测量的。
概念磁阻位移测量装置具有很好的持久精度,不仅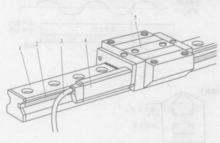 简化了位移传感器的结构,便于装配和调整,导轨除了导向和支承功能外,还具有直线位移测量功能。
简化了位移传感器的结构,便于装配和调整,导轨除了导向和支承功能外,还具有直线位移测量功能。
磁阻位移测量装置工作原理如图2所示,磁性标尺紧贴在导轨侧壁上,并随导轨固定在机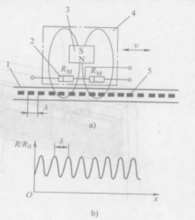 床床身上;检测头固定在滑块上,检测头中有磁敏电阻和信号处理电路等,滑块和工作台等移动部件连接在一起。当工作台移动时。检测头将位移信号通过电缆输出。图2所示为磁阻位移测量装置的工作原理。
床床身上;检测头固定在滑块上,检测头中有磁敏电阻和信号处理电路等,滑块和工作台等移动部件连接在一起。当工作台移动时。检测头将位移信号通过电缆输出。图2所示为磁阻位移测量装置的工作原理。
在图2a中,磁性标尺上的磁性材料按一定间距λ排列,检测头磁铁产生的磁力线穿过两个磁敏电阻尺RM,与标尺上的磁性材料构成磁回路。因为磁性材料呈断续分布,检测头在运动过程中,磁敏电阻上的磁场强度发生改变,所以磁敏电阻的阻值也随之变化。每移动一个λ距离,阻值变化一次,如图2b所示。磁敏电阻的变化值经信号处理电路整形、放大,转换成脉冲信号,作为位移测量信号。两个磁敏电阻相距1/4λ的整数倍,使各自输出的脉冲相位差90°,用于辨向。
因为磁阻位移测量装置中的磁敏电阻不需要复杂的交流激励源,和磁栅相比,具有很高的响应速度,很适合在高速数控机床中进行位移测量。1
基于磁阻传感器的非接触式位移测量力矩信号是塔机安全监控中最重要的参数,它直接影响塔机的安全,监控力矩是否超载是防止塔机司机误操作及疏忽操作而引起塔机恶性事故的保障。国产塔机普遍采用的是机械式力矩限制器。只能在起重力矩达到极限值时触动限位开关达到保护作用,不能显示起重力矩值。通过测量弓形板式力矩限制器弓形板的位移量可以间接测出起重力矩,实现塔机起重力矩在线监测。
位移测量的精度和稳定性直接影响起重力矩测量的准确性。而传统的位移传感是接触式的,像直线电位计等,接触部分经常会磨损、氧化,影响测量精度。光电式位移传感器价格高,受环境影响大。因此研究选用磁阻位移传感器。磁阻传感器体积小,精度高,抗干扰能力强,非接触式测量,不会磨损,而且价格低。正在被越来越广泛地使用。
各向异性磁阻传感器的工作原理对于强磁性金属(铁、钴、镍及其合金),当外加磁场平行于磁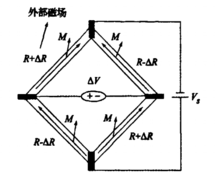 体内部磁化方向时,电阻几乎不随外加磁场而变;当外加磁场偏离金属的内磁化方向时,金属的电阻减小,这就是各向异性磁电阻效应。
体内部磁化方向时,电阻几乎不随外加磁场而变;当外加磁场偏离金属的内磁化方向时,金属的电阻减小,这就是各向异性磁电阻效应。
HMCl501是Honeywell公司开发的磁阻传感器,是由磁阻合金薄膜组成的惠斯通桥电阻电路(如图3所示)。当电阻中有电流流过时,在电桥上施加一个偏置磁场M,这将使得两个相对放置的电阻的磁化方向朝着电流方向转动,从而引起电阻阻值的增加;另外两个相对放置的电阻的磁化方向背向电流方向转动,从而引起电阻阻值减小。当外部磁场的磁场强度大于80高斯时,磁场饱和,磁阻传感器只对所加磁场的方向敏感。
直线位移测量的实现用一个或多个HMCl501,一个磁钢和一套信号调理电路就可实现 位移的测量。图4所示为4个HMCl501组成的传感器列。传感器之间的间距为12.5mm,磁钢与传感器间距12.5mm,磁钢长度为25mm。磁钢沿轴方向移动时,4个传感器的输出波形如图5所示。每个传感器输出的最大值与最小值之间的区域是可利用的。图4所能测的直线位移范围大约为50.8mm。
位移的测量。图4所示为4个HMCl501组成的传感器列。传感器之间的间距为12.5mm,磁钢与传感器间距12.5mm,磁钢长度为25mm。磁钢沿轴方向移动时,4个传感器的输出波形如图5所示。每个传感器输出的最大值与最小值之间的区域是可利用的。图4所能测的直线位移范围大约为50.8mm。
传感器之间的距离取决于磁钢的长度和所要求的系统精度。原则上,一旦磁钢的长度和磁钢与传感器阵列之间的距离确定,每个传感器的线性输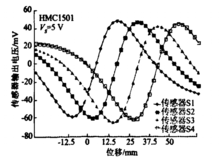 出范围也就确定了。传感器之间的距离应该取其线性范围的一半。因为传感器的输出是正弦函数,所以每个传感器的线性输出范围也与要求的系统精度有关。传感器离得越近精度越高。传感器之间的距离确定后,所需传感器的数量由测量的长度决定。传感器数目越多,测量的位移越大。
出范围也就确定了。传感器之间的距离应该取其线性范围的一半。因为传感器的输出是正弦函数,所以每个传感器的线性输出范围也与要求的系统精度有关。传感器离得越近精度越高。传感器之间的距离确定后,所需传感器的数量由测量的长度决定。传感器数目越多,测量的位移越大。
磁钢必须为其周围的3个传感器同时提供饱和磁场,磁力线方向可以不一致,但X—Y平面的磁场强度之和应大于80高斯。磁钢的几何尺寸,在系统设计中非常重要。磁钢的尺寸由要求的测量范围和精确度决定。每个传感器的可用线性范围由磁钢沿移动方向的长度确定。磁钢长,传感器的可用线性范围增大,但灵敏度降低;磁钢短,可用线性范围减小,但灵敏度增大。
位移的计算。首先要对每个传感器进行标定,补偿电桥的偏移电压,测出每个传感器的输出电压峰一峰值并乘以一个缩放因子,使它们的峰一峰值范围相同。按图5所示确定坐标轴,X轴是位置坐标,Y是电压坐标。固定好传感器位置,使得传感器的间距是理想的,即使得相邻的3个传感器值分别为最高、零和最低。传感器间距为12.5mm,第一个传感器S1所在的位置是6.25mm,第二个传感器S2所在的位置是18.75mm。标定完以后,就可进行测量。计算位移时,必须先确定磁钢的位置。当磁钢处于某位置时。读出4个传感器的输出值,分别比较相邻的两个传感器的输出,如果第i个传感器的输出为正,第i+1个的输出为负,那么磁钢就处于第i和i+1个传感器的之间,这两个传感器中哪个的输出值的绝对值小,磁钢便在哪个传感器的测量范围内。这个传感器测出的值加上它所处的位置值就得到所要测的位移值。
按上述方法,如果要求的测量精度高,传感器间距必须减小,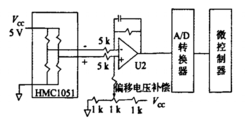 比如要达到5pm的精度,传感器间距应为2.5mm。而通常需测量的塔机弓形板式力矩限制器的弓形板的位移量为几十毫米左右,如QTZ5012塔机弓形板的位移量为20mm。要求的精度在0.01mm以上,则需要的传感器数量要增加很多,不仅使电路的功耗增加,可靠性降低,而且成本增高。所以本文使用非线性补偿的方法,充分利用每个传感器的可用测量区域,一个传感器的测量范围就能达到25mm,测量精度也能满足要求。测量电路如图6所示。
比如要达到5pm的精度,传感器间距应为2.5mm。而通常需测量的塔机弓形板式力矩限制器的弓形板的位移量为几十毫米左右,如QTZ5012塔机弓形板的位移量为20mm。要求的精度在0.01mm以上,则需要的传感器数量要增加很多,不仅使电路的功耗增加,可靠性降低,而且成本增高。所以本文使用非线性补偿的方法,充分利用每个传感器的可用测量区域,一个传感器的测量范围就能达到25mm,测量精度也能满足要求。测量电路如图6所示。
基于BP网络的非线性补偿BP神经网络是人们认识最为清楚、应用最为广泛的一类神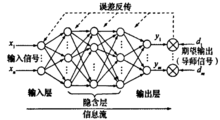 经网络,其性能优势主要在非线性映射、模式识别和特征提取等方面。BP网络能够通过若干简单非线性处理单元的复合映射,从理论上实现从输入空间到输出空间的非线性映射。
经网络,其性能优势主要在非线性映射、模式识别和特征提取等方面。BP网络能够通过若干简单非线性处理单元的复合映射,从理论上实现从输入空间到输出空间的非线性映射。
BP网络是典型的多层网络,分为输入层、隐层和输出层,层与层之间采用全互连方式,同一层单元之间不存在相互连接。如图7所示1个输出结点,隐层含有5个神经元。磁阻传感器的输出电压V作为BP网络的输入,对应的位移量作为网络的输出。使用MATLAB对该神经网络进行训练与仿真。 训练样本如表1所示。设置训练次数为100次,训练终止误差0.001。并选择隐含层传输函数为双曲正切S型函数tansig,输出层的传输函数为线性函数purelin,整个训练经过50步即达到终止误差。
训练样本如表1所示。设置训练次数为100次,训练终止误差0.001。并选择隐含层传输函数为双曲正切S型函数tansig,输出层的传输函数为线性函数purelin,整个训练经过50步即达到终止误差。
研究结论研究采用磁阻传感器,应用BP神经网络对传感器的输出特性进行非线性补偿,实现了位移的高精度,非接触式测量。在实验系统中测试效果良好,并且成本低廉、测量精度高、完全满足起重力矩监测中位移测量的要求。2
本词条内容贡献者为:
李航 - 副教授 - 西南大学

 扫码下载APP
扫码下载APP
 科普中国APP
科普中国APP
 科普中国
科普中国
 科普中国
科普中国