

李亚普诺夫定理是关于实矩阵特征值的一个命题,对n阶实矩阵A和n阶正定矩阵C,若存在正定矩阵B,使得AB+BA′=-C,则A的特征值的实部必全小于零,这个定理由李亚普诺夫(А.М.Ляпунов)提出,在运动稳定性理论中起着重要的作用1。
基本介绍李亚普诺夫定理是数学生态学的重要定理之一,是判定系统稳定性质的重要定理,对于复杂生态系统
 设有正平衡点x*,x*∈Ω⊂Rn+,若在区域Ω内定义的函数V(x)对于系统具有性质:
设有正平衡点x*,x*∈Ω⊂Rn+,若在区域Ω内定义的函数V(x)对于系统具有性质:
1.V(x*)=0,并且x*是V(x)在Ω内惟一整体最小值;
2.在Ω内,对每一个正值K,曲面族V(x)=K都是闭曲面;
3.导数
 对于所有x∈Ω是非正的;则称函数V(x)是系统在Ω内的李亚普诺夫函数。
对于所有x∈Ω是非正的;则称函数V(x)是系统在Ω内的李亚普诺夫函数。
李亚普诺夫定理断言:若系统有正平衡点x*∈Ω,如果存在李亚普诺夫函数V(x),在Ω内dV/dt是负定的,则x在区域Ω内为渐近稳定的(即以Ω内任意点为初值的解,当t→∞时趋于x*),特别当Ω≡Rn+时,x*称为全局渐近稳定的2。
相关说明定理1(李亚普诺夫定理) A的所有特征值都具有负实部,或等价地说, 的零状态是渐近稳定的,当且仅当对于任意给定的正定埃尔米特矩阵N,矩阵方程
的零状态是渐近稳定的,当且仅当对于任意给定的正定埃尔米特矩阵N,矩阵方程
 具有唯一的埃尔米特解M,并且M是正定的3。
具有唯一的埃尔米特解M,并且M是正定的3。
系1 A的所有特征值都具有负实部,或等价地说, 的零状态是渐近稳定的,当且仅当对于任意给定的,具有{A,N}可观测之性质的,半正定埃尔米特矩阵N,矩阵方程
 有唯一的埃尔米特解M,并且M是正定的。
有唯一的埃尔米特解M,并且M是正定的。
定理1和系1的含义是,若A是渐近稳定的,且N正定或半正定,则(1)式的解M必为正定,但这并不是说,若A是渐近稳定且M是正定,由(1)式算得的矩阵N是正定或半正定的。
因定理1对于任何正定埃尔米特矩阵N均成立,故(1)式中的矩阵N常选为单位矩阵,由于M是埃尔米特矩阵,故其中有n2个未知数需要求解,若M是实对称矩阵,则其中有n(n+1)/2 个未知数需要求解。因此,矩阵方程(1)实际上包含有n2个线性代数方程,为了应用定理1,我们必须对M求解n2个方程,随后核查M是否正定,这些工作实非易事,因此,定理1及其系一般并不用来确定 的稳定性。然而,应用李亚普诺夫第二法研究非线性时变系统的稳定性时,定理1却是至关重要的3。
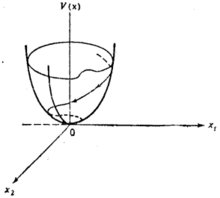
现对李亚普诺夫定理作物理的解释,若埃尔米特矩阵M是正定的,则
V(x) x*Mx, (2)
x*Mx, (2)
的曲面呈碗形,如图1所示.现在设想,沿着 的轨迹连续求取V的值,我们想知道,随着状态沿轨迹移动时, V的值是增加还是减小,沿着 的任何轨迹取V关于t的导数,得



 其中N -(A*M+MA)。上式给出了 V(x)沿着 的任一轨迹的变化率。若N是正定的,则-x*(t)Nx(t)恒为负,这就意味着,沿 的任何轨迹,V(x(t))将随时间而单调下降,所以,当t→∞时,V(x(t))最终将趋于零,因V(x)为正定,故仅在x=0时有V(x)=0,由此断定,若能找到以(1)式相互联系的正定矩阵M和N,则当t→∞时, 的每一个轨迹将趋于零向量。函数V(x)称为 的李亚普诺夫函数,李亚普诺夫函数可以认为是距离或能量概念的推广。如果状态的“距离”沿着 的任何轨迹随时间而减小,则当t→∞时,x(t)必将趋于零3。
其中N -(A*M+MA)。上式给出了 V(x)沿着 的任一轨迹的变化率。若N是正定的,则-x*(t)Nx(t)恒为负,这就意味着,沿 的任何轨迹,V(x(t))将随时间而单调下降,所以,当t→∞时,V(x(t))最终将趋于零,因V(x)为正定,故仅在x=0时有V(x)=0,由此断定,若能找到以(1)式相互联系的正定矩阵M和N,则当t→∞时, 的每一个轨迹将趋于零向量。函数V(x)称为 的李亚普诺夫函数,李亚普诺夫函数可以认为是距离或能量概念的推广。如果状态的“距离”沿着 的任何轨迹随时间而减小,则当t→∞时,x(t)必将趋于零3。
本词条内容贡献者为:
胡建平 - 副教授 - 西北工业大学

 扫码下载APP
扫码下载APP
 科普中国APP
科普中国APP
 科普中国
科普中国
 科普中国
科普中国