

穆尔-彭罗斯广义逆矩阵(Moore-Penrose generalized inverse matrix)是逆矩阵概念的推广,彭罗斯(R.Penrose)于1995年证明了对任一m×n阶矩阵A,都存在惟一的n×m阶矩阵X,它满足:1.AXA=A;2.XAX=X;3.(AX)*=AX;4.(XA)*=XA;则称X为A的穆尔-广义逆矩阵,简称M-P逆,记为A+。当A为n阶非异阵时,其逆A-1也满足条件1到4,故M-P逆确为通常逆矩阵的推广。在矛盾线性方程组Ax=b的最小二乘解中,x=A+b是范数最小的的一个解,任意矩阵的广义逆定义,最早是由穆尔(E.H.Moore)于1920年提出来的,根据实际问题的需要,一些学者还研究了其他各种类型的广义逆矩阵1。
基本介绍穆尔-彭罗斯广义逆矩阵是一种广义逆矩阵,设A是s×n复矩阵,如果n×s复矩阵G满足:
1.AGA=A;
2.GAG=G;
3.( )′=AG;
)′=AG;
4.( )′=GA,
)′=GA,
则G称为A的穆尔-彭罗斯广义逆矩阵。显然,A与G互为穆尔-彭罗斯广义逆,任意的s×n复矩阵A有惟一的穆尔-彭罗斯广义逆,记为A+。
相关性质矩阵A的广义逆A+有如下的性质:
1.A+的秩r(A+)=r(A)=r(A′);
2.(A+)+=A;
3.(A′)+=(A+)′,因此,若A是对称矩阵,则A+也是对称矩阵;
4.(A′A)+=A+(A+)′,因此,若A是半正定矩阵,则A+也是半正定矩阵;
5.AA+,A+A都是幂等矩阵。
穆尔-彭罗斯广义逆矩阵在最小二乘法中有用2。
相关说明设A为m×n的实矩阵,若n×m的矩阵H满足下列条件:
AHA= A,HAH=H,(AH)T=AH,(HA)T= HA (1)
则H称为A的穆尔-彭罗斯广义逆矩阵。该逆矩阵的唯一解通常表示为A+。可证明,若对A进行奇异值分解,即:
A= USVT, (2)
那么,根据正交矩陈的特性3:
A+= VS+UT, (3)
式中S+是n×m的矩阵,
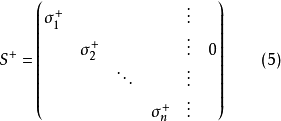 其中
其中
穆尔-彭罗斯广义逆是很多广义逆之一(Ben-Israel和Greville,1974)。也就是说,对当作逆的矩阵H有其它选择,因而对问题Ax= b可得不同的近似解。例如,在阻尼最小二乘方法(或脊式回归)中,矩阵H选为:
H= VFS+UT (7a)
该式中F是n×n对角滤波矩阵,其分量为:
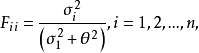 (7b)
(7b)
式中θ是大大小于最大奇异值σ1的调节参数。
该逆矩阵H的作用是产生估算值 ,与穆尔-彭罗斯广义逆的解所得的值相比,可能它的沿相应于最小奇异值的奇异矢量分量被阻尼了。可以证明该是下列问题的解:
,与穆尔-彭罗斯广义逆的解所得的值相比,可能它的沿相应于最小奇异值的奇异矢量分量被阻尼了。可以证明该是下列问题的解:
对 求极小 (7c)
求极小 (7c)
这样就代表了在数据拟合和解的大小限制之间的折衷。这种思路也用于非线性最小二乘法,即大家熟知的利文伯格-马今特法中(Levenberg-Marquardt method ) 。
与一般的逆矩阵不同,即使矩阵是奇异的,穆尔-彭罗斯的广义逆矩阵总是存在的。在构成这种广义逆矩阵时,必须小心地处理零奇异值。在式(6)中, 仅当σi>0时,定义σi+=1/σi;而当σi= 0时,则定义σi+=0。这就避免了一般求逆时由σi-1=1/σi带来的问题。而且,奇异值可帮助理解矩阵的秩和矩阵的条件。
通常矩阵秩定义为最大互不相关的列数,这样一个定义实际上很难应用于一般矩阵。然而若矩阵是三角形的,秩就是非零对角元素的数目。由于正交变换,比如在奇异值分解中的变换,并不影响秩,立即可以发现A的秩与其奇异值分解中S的秩相等,因此矩阵秩实用的定义是非零奇异值的数目。由于计算机精度有限,可能很难区别一个小奇异值和零奇异值,因而定义有效秩是大于某预定容限的奇异值数。容限反映了机器和数据的精度。
最后需指出,广义逆的奇异值分解(SVD)方法为我们的问题提供了有效的分析手段。哥鲁布和莱因思奇(Golub,Reinsch,1970)研究出奇异值分解的数值计算。在大多数计算中心,子程序库中一般都有奇异值分解子程序。虽然奇异值分解分析比乔勒基(Cholesky)法解正规方程要化去较多计算机时间, 但这是很值得的。按乘法运算的实际计数,奇异值分解需2mn2+4n3,而正规方程方法则需mn2/2 +n3/6。 例如,若解300个未知数的1000个方程,奇异值分解分析所需要的计算机时间约比正规方程方法长6倍。
但这里需指出正规方程方法的两大缺点。第一,正规方程矩阵的条件数是原始矩阵条件数的平方。这样,在组成正规方程和求解它时,需要把浮点精度t提高一倍才能避免计算中的舍人误差。第二,正规方程方法不能计算信息密度矩阵3。
本词条内容贡献者为:
胡建平 - 副教授 - 西北工业大学

 扫码下载APP
扫码下载APP
 科普中国APP
科普中国APP
 科普中国
科普中国
 科普中国
科普中国