

伪微分回授控制是自动控制的名词,是以实际工程约束条件为基础的一种高性能控制架构,由Phelan1977年提出。它以实际工程系统作为出发点,然后按照实际被控对象的各种性能指标来设计控制器,其架构类似PI控制器,但在控制一阶系统时,控制器及系统整体转换函数没有零点,常用在运动控制中。它的目标值和回授的误差作为积分控制器的输入,回授作为比例控制器的输入,又被Phelan称为“伪误差回授”。1
概念详解伪微分回授控制是基于实际的工程控制系统,选定纯积分控制为理想的控制作用,在前向通道中只设定积分控制运算,与此同时引入了末级控制元件,把低能量信号转化为高能量信号(受最大输出能力的限制),即将控制器的信号级指令转换为被控对象的功率级驱动力的一种高性能控制架构。现实控制系统中,伪微分回授控制本质要求是控制系统能量的传输与分配,伪微分回授控制的设计思想正是基于这一实际状况实现的。伪微分回授控制系统一般按误差进行控制,控制器能够对输入的误差信号进行运算,从而对末级控制元件产生输出指令并调节它的能量输出,致使被控对象往误差减小的方向运动,可以认为它是一种采用状态反馈的积分控制系统,在实际的工程中有很高的应用价值。1
伪微分回授控制的基本思想伪微分回授控制,最开始是由美国康奈尔大学 Phelan教授在基于大量的工程实践基础上提出的。西南交通大学的陈留教授在美国访问期间,同 Phelan教授合作深层次地发展和完善了这一理论,在一阶、二阶和高阶控制系统中都达到了比较好的效果。目前PDF控制已在机器人手臂、温度控控制和电液伺服等系统中得到了很好的应用。按照PDF理论设计出的控制系统一般都具有优良的抗干扰能力和快速响应的能力。2
实际被控制对象与其理想化的模型的一般存在很大的区别,实际对象包含非线性特征以及其他各种因素,如静摩擦效应和对象中固有的非黏性干摩擦,系统自身参数的变化、元件漂移以及运动中的饱和死区和时滞等。在控制系统的研究和综合分析中,通过数学抽象归纳出来的线性模型本来就是近似的,实际对象参数的准确识别还受很多不确定因素的影响。现阶段为止,基于线性理论的工程控制系统的设计主要采用两种传统方法。一种是工程最佳参数设计,比如以“模最佳”为等同目标的二阶工程设计和三阶对称参数设计十法。另外一种是对初步构成的控制系统进行补偿校正,使响应的性能达到预先确定的时域或频域性能指标,一般通过试探得到。这两种传统方法的最大缺点在于它们没有考虑在实际工程中的一个非常重要的约束条件—驱动力的功率限制。2
伪微分反馈控制是以实际工程约束条件为基础的一种高性能控制方法。它以实际工程系统作为出发点,然后按照实际被控对象的各种性能指标来设计控制器的。在常规的控制理论中,比例( Proportional)、积分( Integral)和微分(Derivative)是最基本的三种控制规律。比例控制可以缩小误差,但无法完全消除系统的静态误差;积分控制可消除系统的静态误差,提高系统的抗干扰能力,但会使系统响应速度变慢,超调量增大甚至可能出现振荡,有滞后现象;微分控制可以提高系统的响应速度,减小超调量增大系统阻尼,从而达到改善系统的动态性能,但是系统的抗干扰能力也会随之减弱。从控制器的实用角度看,如果同时存在微分和积分,那么这两个作用势必会互相牵制,而一个良好的控制器通常需要有效地处理误差信号,因此伪微分回授控制提出应该只设置积分这一种运算在控制器的前向通道上,即 ONE MASTER原则,这可以简单解释如下:
 用右图来表示一个控制系统,图中末级控制元件( FINAL CONTRAL. ELEMENT)是指在控制系统中对被控对象施加能量的元件,如电液伺服阀、功率放大器等。一般在下列三种情况下,末级控制元件需要对被控对象施加能量。1
用右图来表示一个控制系统,图中末级控制元件( FINAL CONTRAL. ELEMENT)是指在控制系统中对被控对象施加能量的元件,如电液伺服阀、功率放大器等。一般在下列三种情况下,末级控制元件需要对被控对象施加能量。1
(1)当误差e不为零时,此时需要对被控对象施加能量,促使被控量C朝着减少误差方向变化。
(2)误差e不为零,对被控对象施加能量时,若因干摩擦或者死区等因素作用,被控量C无法立刻向误差减小的方向转变,此时需要提高能量输入一直到被控制量C开始向着误差减小的方向转变为止。
(3)若误差e已经为零,但此时产生一个外加干扰L作用,被控对象需要被施加能量,来抵消掉干扰L的影响。
在比例微分积分这三种控制作用中,比例控制能实现要求(1),但却不能实现要求(2)和(3),但是微分运算不仅无法达到任何一条要求,而且还会给系统引发噪声问题,相较而言,仅有积分控制规律可以同时满足上述三个要求并能理想的过滤掉噪声。因此伪微分回授控制提出应只有积分运算存在前向通道中。
伪微分回授控制的架构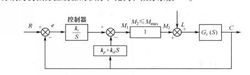 右图中,R为参考输入,e是误差信号,L是干扰信号,C是输出信号,
右图中,R为参考输入,e是误差信号,L是干扰信号,C是输出信号, (S)是被控对象的传递函数,末级的控制单元用传递函数为1的方框表示,
(S)是被控对象的传递函数,末级的控制单元用传递函数为1的方框表示, 为其低能量级的控制输入信号,
为其低能量级的控制输入信号, 为其高能量级控制输出信号。因为受到实际的控制元件制约,始终有≤
为其高能量级控制输出信号。因为受到实际的控制元件制约,始终有≤ ,
, 、
、 、
、 分别为伪微分回授控制器的积分、比例、微分系数。1
分别为伪微分回授控制器的积分、比例、微分系数。1
一般控制系统对控制器要求如下:2
(1)对输入的所有误差(时变值或恒值)都应有反应;
(2)一切形式干扰产生的误差都能够被消除;
(3)如果被控对象没有按指令动作,该控制器应能提供随时间推移而递增的输出功率;
由PDF的控制框图可以看出,前向通道只存在积分运算的伪微分回授控制器既可保证控制系统的响应速度又可以避免静差。输出信号相较于输入信号会平滑,因此微分环节不会像传统PID控制中产生的微分突变现象,能达到比较好的控制效果。2
本词条内容贡献者为:
李斌 - 副教授 - 西南大学

 扫码下载APP
扫码下载APP
 科普中国APP
科普中国APP
 科普中国
科普中国
 科普中国
科普中国