

传感器矩阵是一组传感器,通常以某种几何图案部署,用于收集和处理电磁或声学信号。使用传感器矩阵而不是使用单个传感器的优点在于,阵列为观测增加了新的维度,有助于估计更多参数并提高估计性能。例如,用于波束成形的无线电天线元件矩阵可以增加信号方向上的天线增益,同时减小其他方向上的增益,即通过相干地放大信号来增加信噪比(SNR)。传感器矩阵应用的另一个例子是估计撞击电磁波的到达方向。相关的处理方法称为阵列信号处理。阵列信号处理的应用实例包括雷达/声纳,无线通信,地震学,机器状态监测,天文观测故障诊断等。
原理图1示出了六元件均匀线性阵列(ULA)。 在该示例中,假设传感器阵列位于信号源的远场中,使得它可以被视为平面波1。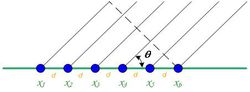
参数估计利用了这样的事实,即从阵列中的源到每个天线的距离是不同的,这意味着每个天线处的输入数据将是彼此的相移复制品。式(1)示出了相对于第一个阵列到达阵列中的每个天线所花费的额外时间的计算,其中c是波的速度。
 (1)
(1)
每个传感器都有不同的延迟。延迟很小,但并非微不足道。在频域中,它们显示为传感器接收到的信号之间的相移。延迟与入射角和传感器阵列的几何形状密切相关。 给定阵列的几何形状,可以使用延迟或相位差来估计入射角。式(1)是阵列信号处理的数学基础。简单地将传感器接收的信号相加并计算平均值得到结果。
 (2)
(2)
因为接收的信号是异相的,所以与原始信号源相比,该平均值不会产生增强的信号。 启发式地,如果我们可以找到权重乘以接收信号以在求和之前将它们设置为相位,即平均值:
 (3)
(3)
会导致信号增强。 将良好选择的一组权重与传感器阵列接收的信号相乘以便在抑制噪声的同时建设性地添加信号的过程称为波束形成。 传感器阵列有多种波束形成算法,例如延迟求和方法,基于光谱(非参数)方法和参数方法。
矩阵设计传感器阵列具有不同的几何设计,包括线性,圆形,平面,圆柱和球形阵列。 存在具有任意阵列配置的传感器阵列,其需要更复杂的信号处理技术用于参数估计。 在均匀线性阵列(ULA)中,输入信号 的相位应限制在
的相位应限制在 以避免光栅波。 这意味着对于在[
以避免光栅波。 这意味着对于在[ ]区间内的到达角
]区间内的到达角 ,传感器间距应该小于波长
,传感器间距应该小于波长 的一半
的一半 。 然而,主光束的宽度,即阵列的分辨率或方向性,由阵列的长度与波长相比确定。 为了有一个体面的方向分辨率,阵列的长度应该比无线电波长大几倍。
。 然而,主光束的宽度,即阵列的分辨率或方向性,由阵列的长度与波长相比确定。 为了有一个体面的方向分辨率,阵列的长度应该比无线电波长大几倍。
传感器矩阵的类型天线矩阵天线矩阵(电磁),天线元件的几何布置,其电流之间存在故意关系,通常形成单个天线以实现所需的辐射方向图。
定向矩阵,为方向性优化的天线矩阵。
相控阵,一种天线阵,其中应用于元件的相移(和幅度)被电子修改,通常是为了控制天线系统的方向图,而不使用移动部件。
智能天线是一种相控阵,其中信号处理器计算相移以优化对接收机的接收和/或传输,例如蜂窝电话塔。
数字天线阵列,这是使用多通道数字波束形成的智能天线,通常使用FFT。
干涉射电望远镜或光学望远镜的干涉阵列,用于通过干涉相关实现高分辨率。
Watson-Watt / Adcock天线阵列,使用Watson-Watt技术,由此使用两个Adcock天线对对输入信号执行幅度比较。
声阵列麦克风阵列用于声学测量和波束形成。
扬声器阵列用于声学测量和波束形成。
其他矩阵地震检波器阵列用于反射地震学。
声纳阵列是用于水下成像的一系列水听器。
延迟求和波束形成如果对来自每个麦克风的记录信号添加时间延迟,该时间延迟与由附加传播时间引起的延迟相等且相反,则将产生彼此完全同相的信号。对这些同相信号求和将导致相长干涉,这将通过阵列中的天线数量放大SNR。这被称为延迟和求和波束形成。对于到达方向(DOA)估计,可以迭代测试所有可能方向的时间延迟。如果猜测错误,信号将受到破坏性干扰,导致输出信号减弱,但正确的猜测将导致上述信号放大。
问题是,在估计入射角之前,怎么可能知道与额外行程时间引起的延迟相等的时间延迟?是不可能的。解决方案是以足够高的分辨率尝试一系列角度 [
[ ],并使用等式1计算得到的阵列的平均输出信号。最大化平均输出的试验角度是由延迟和总和波束形成器给出的DOA的估计。向输入信号添加相反的延迟等同于物理旋转传感器阵列。因此,它也被称为波束控制。
],并使用等式1计算得到的阵列的平均输出信号。最大化平均输出的试验角度是由延迟和总和波束形成器给出的DOA的估计。向输入信号添加相反的延迟等同于物理旋转传感器阵列。因此,它也被称为波束控制。
本词条内容贡献者为:
王慧维 - 副研究员 - 西南大学

 扫码下载APP
扫码下载APP
 科普中国APP
科普中国APP
 科普中国
科普中国
 科普中国
科普中国