

高增益观测器简言之就是根据系统的输入变量,输出一种放大较大倍数值状态变量估计值的一类状态观测器。
定义高增益观测器在如下形式的非线性系统:




其中, 和
和 为状态向量,
为状态向量, 为输入,
为输入, 为可量测的输出。
为可量测的输出。
可以看出标称模型是该系统的一种特殊情况,
即其中 ,
, 和u无关,且
和u无关,且 。
。
更进一步,严格反馈型也是它的一种特殊情况,其中 ,
, 和
和 与
与 无关,并具有
无关,并具有 的形式。
的形式。
假设在研究的区域内, ,
, ,…,
,…, 和
和 对其变量是局部Lipschitz的, ,…, 关于x对 是一致Lipschitz的,即
对其变量是局部Lipschitz的, ,…, 关于x对 是一致Lipschitz的,即

进一步,我们假设对于所有 ,
, 和
和 都是有界的。
都是有界的。
用于观测z的部分状态观测器可设计成


其中, 关于x对u是一致的Lipschitz函数,
关于x对u是一致的Lipschitz函数, 是充分小的正常数,选择
是充分小的正常数,选择 ,…,
,…, ,以使
,以使

的所有根具有负实部,部分状态观测器式中的 是
是 的标称型。假设
的标称型。假设

因为

且 是Lipschitz的,所以上式就是要求建模 误差有界。1
误差有界。1
引理在上述条件下,存在 ,使得对于
,使得对于 。,高增益观测器式的估计误差
。,高增益观测器式的估计误差
满足

证明:定义标量估计误差

可以证明 满足方程
满足方程

 ,
, 和
和

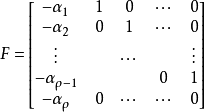
因为F的特征方程是式是Hurwitz矩阵。根据上式得, ,
, ,
, 满足
满足

由此可得
其中, 和
和 无关,这里的
无关,这里的 ,而
,而 是任意给定的。取
是任意给定的。取 ,其中
,其中 为Lyapunov方程
为Lyapunov方程 的解,则
的解,则

由上式可得 ‘

选取 ,可得
,可得

由定理可知

其中,a、c和k为正常数。由上式可得,如果 和
和 ,定理得证。1
,定理得证。1
本词条内容贡献者为:
宋春霖 - 副教授 - 江南大学
 扫码下载APP
扫码下载APP
 科普中国APP
科普中国APP
 科普中国
科普中国
 科普中国
科普中国