

简介
船舶设计过程中为了获得螺旋桨与船体之间的相互作用诸因素,如伴流分数、推力减额分数以及其他相互作用系数,应进行三种试验:船模阻力试验、螺旋桨敞水试验及有附体的船模自航试验。通过自航试验可以得知船舶的如下内容:1)估算实船的航行性能,即主机马力、转速和船速之间的关系;2)分析推进效率的各种成分,为设计合理的推进器提供资料;3)比较船型快速性能的优劣。2
自航试验的目的通过船模阻力试验及螺旋桨模型敞水试验,我们分别求得船体阻力曲线及螺旋桨敞水性能曲线。但实际上,船体和螺旋桨对实船而言是一个整体,按装于船体后面的螺旋桨与船体之间彼此影响附近的水流速度场和压力场,而且这种影响非常复杂,迄今还不能用纯粹的理论计算方法求得。依目前的研究水平,船模自航试验仍然是研究船体和螺旋桨之间相互作用的最好方法。
船模自航试验的主要目的:
1、分析研究各种推进效率成份,研究桨、船两者的相互影响,从而为螺旋桨的修改设计提供依据,或从若干船体与螺旋桨的组合方案中选优。
2、预报实船性能。即通过试验给出主机功率、转速和船速之间的关系,得出实船的航速预报。
3、判断螺旋桨、主机、船体之间的配合是否良好。2
自航试验的相似准则在船模阻力拖曳试验时,一般只满足船模和实船傅氏数相等的条件,在螺旋桨敞水试验时,通常只满足进速系数相等的条件,由于雷诺数相等的条件在实际上无法满足,因而只要求模型的雷诺数达到临界值以上。但在自航试验时,水面必然形成波浪,对螺旋桨的性能也有影响,故实船及其船模必须满足如下条件:
(1)傅氏数相等,即实船及其船模,实桨及其桨模之傅氏数都应相等。
设V、L及VM、LM分别表示实船及其船模的速度和长度,VA、D及VAM、DM分别表示实桨及其桨模的进速和直径,则满足傅氏数相等的条件为
对于实船及其船模

对于实桨及其桨模
假定船速与螺旋桨进速之比值不受尺度作用的影响,则有:
 式中,
式中, 为实船与其船模、实桨及其桨模之尺度比。
为实船与其船模、实桨及其桨模之尺度比。
上式即为自航试验满足傅氏数相等的条件。
(2)实奖及其奖模的进速系数相等,即
 式中,n及nM分别表示实桨及其桨模的转速。
式中,n及nM分别表示实桨及其桨模的转速。
比较上述两个式子可知,在同时满足傅氏数及进速系数相等时,实桨及其桨模的转速之间应满足下列条件:

至于雷诺数相等的条件总是无法满足的,一般只要求船模及桨模能在临界雷诺数以上进行试验即可。
综上所述,实船及其船模的尺度比λ选定后,自航试验时船模的速度及其桨模的转速应由下式决定:


同时,在满足上述条件和不计尺度作用的情况下,可将桨模的推力、转矩及功率直接按下式换算成实桨的相应数值:

 式中,T、Q、P和ρ及TM、QM、PM和ρM分别表示实桨及其桨模的推力、转矩、功率和水的密度。2
式中,T、Q、P和ρ及TM、QM、PM和ρM分别表示实桨及其桨模的推力、转矩、功率和水的密度。2
自航试验方法自航试验方法有纯粹自航和强迫自航。纯粹自航试验时,在船模阻力仪上预加作为摩擦阻力修正值的自航拖力,驱动螺旋桨后船模等速直线前进,调节拖车速度使之与船模同步,但调节拖车速度与船模同步较为困难,另外在研究实船与船模相关问题时有一定局限性,故应用较少。常用的是强迫自航试验方法,试验时自航船模在螺旋桨推力与拖车强制力作用下运动,借调整拖车强制力以保持船模与拖车速度一致。当在螺旋桨推力作用下船模速度大于拖车速度时,在拖车上对船模施以附加阻力减缓船模速度;反之,当自航船模速度小于拖车速度时,则在拖车上对船模施以拉力以增加船模速度。显然,在拖车对自航船模不起作用时,即为船模速度等于拖车速度,即相当于纯粹自航情况。常采用的强迫自航试验方法是船模速度不变,系统改变螺旋桨转数,试验记录船模速度、螺旋桨推力、扭矩、转数、拖车对船模的强制力,并将此与船模阻力试验及螺旋桨敞水试验数据一并分析。2
自由自航法此种方法在欧洲大陆、美国和日本应用最广,故俗称大陆法。在进行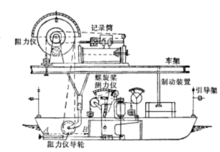 自航试验时,按船模及其实船傅氏数相等的条件选定若干个船模试验速度,对每一选定的速度预先决定其摩擦阻力修正值。各种测量仪器的布置如图2所示,阻力仪上钢丝经导轮连接于船模上A点处。在进行试验时,阻力仪砝码杆上所挂之砝码重量相应于摩擦阻力的修正值。然后开动拖车,并借制动装置迫使船模与拖车一起进行加速,在加速过程中调整螺旋桨的转速。待拖车达到所需之船模速度时,将制动装置松开,使船模的运动不受拖车影响,并进一步调整螺旋桨的转速,使拖车速度和船模速度相同,这时船模处于稳定的自航状态,即开始记录该状态下拖车的速度(即船模速度)、螺旋桨的推力、转矩及转速。
自航试验时,按船模及其实船傅氏数相等的条件选定若干个船模试验速度,对每一选定的速度预先决定其摩擦阻力修正值。各种测量仪器的布置如图2所示,阻力仪上钢丝经导轮连接于船模上A点处。在进行试验时,阻力仪砝码杆上所挂之砝码重量相应于摩擦阻力的修正值。然后开动拖车,并借制动装置迫使船模与拖车一起进行加速,在加速过程中调整螺旋桨的转速。待拖车达到所需之船模速度时,将制动装置松开,使船模的运动不受拖车影响,并进一步调整螺旋桨的转速,使拖车速度和船模速度相同,这时船模处于稳定的自航状态,即开始记录该状态下拖车的速度(即船模速度)、螺旋桨的推力、转矩及转速。
在科学研究中,有时需对一系列的模型进行自航试验,以便全面地分析螺旋桨与船体问的相互作用问题。在这种情况下,并无对应的实船存在,故常修正到一定标准尺度的船。2
强迫自航法这种方法是使自航船模在螺旋桨推力和拖车上的强制力作用下运动,亦即借调整强制力以保持船模和拖车的速度相一致。当桨模推进船模之速度大于拖车的速度时,则拖车将对船模施以附加阻力延缓其运动速度(此时阻力仪摆轮上的钢丝应经过导轮系于船模上的B点,见图1),反之,当船模的速度小于拖车的速度时,则拖车将对船模施以拉力增加其运动速度(此时阻力仪摆轮上的钢丝应经过导轮系于船模上的A点,点A与点B的位置应在桨模轴线附近)。显然,在拖车对自航船模不起作用时(桨模本身推进船模之速度恰为拖车的速度,强制力为零时),就相当于自由自航状态。
 进行强迫自航试验时,可固定拖车速度(船模速度)VM,改变桨模转速nM。 也就是,首先选定若干个船模试验速度,对每一选定的船模速度VM,改变若干次桨模之转速nM,测量各转速时的推力TM、转矩QM和拖车对船模的强制作用力ZM(ZM值由阻力仪记录),然后以ZM、TM和QM为纵坐标, 以nM为横坐标,把每一选定拖速下所测量的ZM、TM和QM连成曲线(对每一选定拖速,通常改变桨模转速4~5次,如图2所示,取强制作用力ZM等于该拖速时的FD,即得相当于实船的自航点,据此从图中可读出相应点的nM、TM和QM值(图中ZM=0的相应交点为船模的自航点)。2
进行强迫自航试验时,可固定拖车速度(船模速度)VM,改变桨模转速nM。 也就是,首先选定若干个船模试验速度,对每一选定的船模速度VM,改变若干次桨模之转速nM,测量各转速时的推力TM、转矩QM和拖车对船模的强制作用力ZM(ZM值由阻力仪记录),然后以ZM、TM和QM为纵坐标, 以nM为横坐标,把每一选定拖速下所测量的ZM、TM和QM连成曲线(对每一选定拖速,通常改变桨模转速4~5次,如图2所示,取强制作用力ZM等于该拖速时的FD,即得相当于实船的自航点,据此从图中可读出相应点的nM、TM和QM值(图中ZM=0的相应交点为船模的自航点)。2

 扫码下载APP
扫码下载APP
 科普中国APP
科普中国APP
 科普中国
科普中国
 科普中国
科普中国