

目视飞行下飞机轨迹控制相关定义
目视间隔定义:在气象条件许可的情况下,通过航空器机长之间相互能见,或管制员能见航空器来确保航空器间安全运行的一种间隔类型,目视间隔适用于IFR和UFR飞行计划的航空器。目视间隔是确保飞行安全的一种方法,可适用于飞行高度FL180(不含)以下的航路、终端和塔台管制区。当航空器驾驶员能见另一航空器,并表明愿意接受目视间隔时,目视间隔的实质是将间隔责任委托给航空器驾驶员。建立目视间隔前,雷达管制员必须通过雷达给驾驶员必要的交通咨询,如相关航空器的方位和距离,以便航空器驾驶员目视判明目标。
目视进近定义:当部分或全部仪表进近程序尚未完成时,空中交通管制部门允许IFR飞行计划的航空器驾驶员保持目视飞向目的机场。由于它不是仪表进近程序,因此不设复飞航段。目视进近可由管制员发起或飞行员主动提出。
相关规定美国联邦航空局规章《A eronautical In form anonM anual》规定,实施目视进近的最低气象条件为:云底高大于1000英尺,能见度大于3标准英里。
FA A 7110.65 (A it TrafficControl)规定雷达管制员引导航空器准备进行目视进近最低气象标准为:着陆机场的云底高大于最低雷达引导高度(M VA ) 500英尺以上,能见度大于3海里。上述标准为最低标准,美国的管制部门通常根据实际运行的需要调高最低标准。
典型事件以下是某机组驾驶A 320飞机执行三亚航班在三亚机场目视起落航线的过程描述:该航班以2400m过W L导航台,塔台指挥1200 m过K台(本场的西近台),上空后加入26号起落航线,机组保持目视后飞向上空,高度为1650 m (5400 FT)过上空,并设置了形态2。由于高度过高,机组保持航向飞出3N M以后左转加入三边,进入三转弯时高度仍然偏高,飞机完全进入四边后高度仍有600 m(2000 FT),机组开始顶杆,产生1500FT/MIN的下降率。记录到一起低空大下降率的事件。进入起落航线后,该机组的操作和FCOM上偏离较为明显PF继续保持该下降率,以小坡度转弯切入五边,在距跑道入口3.4N M处,高度1000E T,但仍然保持1500E T下降率,继续记录到第二起低空大下降率事件。最后当稳定在五边航迹上400E T时记录到一起低下降角度的不安全事件。
事件分析三亚26号目视起落航线属于D类空域即塔台管制区域,仪表飞行的飞机在符合目视飞行规则的条件下,经飞行员申请、管制员批准并接受空中交通管制服务才可以按照目视规则飞行。不同于国外非管制机场的加入起落航线程序,所有国内机场加入起落航线需要得到管制许可并沿其规定的航线加入。所以如果申请目视进近,一定要事先了解机场的管制程序。三亚机场北靠山区、南临大海,在进场时通常指挥2400 m过W L导航台,然后飞向本场西近台K,在出航W L台约13 km处,由于受到机场磁方位348度,距离8250 m,标高为793 m的障碍物(黄廉岭)影响,此处飞行高度一般限制在1500 m,然后管制指挥下1200 m过K台,过K台或本场上空后下450 m或600 m左转加入26号左三边。由于国内暂时没有发布过目视进近图,机组在执行目视进近时除了要时刻保持机场以及同一区域内飞机活动目视外并需要对区域内地形地貌有致的了解。该机场曾发生过某航空公司的飞机在做目视起落时错把三亚海军机场当成凤凰机场而准备落地,后得到塔台的及时提醒而拉升复飞。当我们在做起落航线时,根据大致的起落航线和海军机场的方位关系,三亚海军机场是一个较好的判断三转弯及四转弯时机的地标。其16号跑道延长线和凤凰机场三边的交点是大致的三转弯点,其0'号跑道延长线和凤凰机场的四边交点是大致的四转弯点。在四转弯时,五边的北侧障碍物较多,有些机组提前切入五边以防止受到地形的影响。然而从地形图上来看,该处障碍物在五边北侧约1 NM之外,也在该非精密进近跑道的进近面、锥形面一障碍物控制面之外,符合目视进近的跑道的净空要求,在四边时正常转弯下高度完全处于保护区域之内。但是,五边约5 NM的障碍物(抱坡岭)却要求机组不能把五边做的太长,220 m的标高对飞行影响较大,塔台也提醒过机组注意五边长度。
分析结果从上面的分析我们可以看到,在W L点下降前如果管理好飞机的能量,严格从K台飞越加入26号的左三边,并按照FCOM中对目视进近的要求执行目视进近是可以在正常的飞机状态下完成安全落地。但是整个起落航线可能会是一个连续下降的过程。另外,如果机长预期无法执行目视进近,机长有责任向管制部门尽快告之。同时,目视进近不是仪表进近程序,不包含仪表程序中的复飞部分,如果在起落航线中需要复飞,应立即向塔台报告并要求管制服务。
综上所述,该起事件中轨迹不稳定的原因是未管理好飞机的能量,导致飞机无法完成安全落地,其中人为因素占据很大的部分,为了避免类似事故发生,应该合理确定目视间隔和严格按照目视进近操作规定执行。1
舰载飞机着舰下滑轨迹控制舰载飞机是以航空母舰为基地的作战机种,因此,要求它必须满足和适应航空母舰的工作环境、自然环境和作战环境,当然也就需解决舰载飞机与航空母舰环境的适配性问题。
海上的自然环境比陆地复杂和恶劣,飞机在航空母舰上着舰时存在比较大的外界干扰(如大气紊流、甲板风及航空母舰扰流等)。要使飞机准确、安全地在航空母舰上着舰,除在航空母舰上配置有自动着舰系统(ACLS )、光学或微波助降系统及甲板运动补偿系统(DMC)外,还要求飞机有较好的下滑轨迹保持能力。因此,舰载飞机上一般都设置有自动飞行控制系统(AFCS )。同时,舰载飞机上还设置有进场功率补偿器系统(APCS ),以改善甚至消除速度不稳定现象,提高下滑轨迹精度。2
飞行轨迹控制飞机在着舰下滑的最后阶段,为了跟踪母舰这个活动的目标并准确地在甲板上着舰,保持高精度的下滑轨迹是极为重要的。然而,由于海面大气素流和舰尾流的存在,外界干扰可能极为强烈,飞机很容易偏离预定的下滑轨迹,且此时飞机着舰速度一般都比较低,需安较大的飞行迎角,飞行的迎角如果超过了升阻极曲线上最大升阻比点所对应的迎角。在推力不变的情况下飞机将进入速度不稳定区。舰载飞机在着舰下滑段一般都超过这个迎角,从而使轨迹的保持较为困难。进场功率补偿器系统的作用就在于根据飞行状态量的反馈通过操纵飞机的舵面(平尾)和油门(改变推力)来克服这些外界干扰并对速度进行滤波,维待飞机在这一阶段飞行的速度、迎角以及俯仰角近似为常数,以达到保持下滑轨迹的目的。
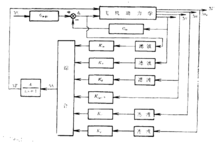
控制反馈量在APCS系统的各反馈环节中,理论上可以将所有状态向量的偏差都进行反馈,实际上由于有的状态量不易感受和测量,同时,有的状态量也没有必要进行反馈。在APCS中一般反馈以下几种状态量:
a.迎角偏差反馈
迎角偏差反馈环节的增益为Ka,它主要用以调整Da和La。这个反馈对短周期模态有明显影响,而对长周期沉浮模态的频率和阻尼影响不大。
b.速度偏差反馈
速度偏差反馈环节的增益为Kv,它将增大长周期的沉浮模态的阻尼,从而改善飞行轨迹的稳定性。另一方面,它会降低Lv的值,使得长周期模态频率有所下降。
c.过载偏差反馈
过载偏差反馈环节的增益为Knz,这个反馈混合了迎角和速度反馈的效应。
d.迎角偏差的积分反馈
迎角偏差的积分反馈环节的增益为K户,在APCS系统中用这一反馈来消除静态误差,提供一种稳态滤波,达到维持迎角近似为常数的目的。这个反馈倾向于增加长周期模态的频率和降低该模态的阻尼。
e.俯仰姿态反馈
俯仰姿态反馈环节的增益为Ka,这个反馈用来调整推力以克服重力在轨迹方向上的投影分量。
f.平尾操纵量反馈
平尾操纵量反馈环节的增益为Kdt,此反馈控制用来调节推力以克服平尾偏转本身带来的阻力增量。
飞行轨迹控制系统用APCS系统来改善飞机的飞行轨迹响应是很有用的,它与飞机的基本特性有关,尤其是与飞机的升阻比以及发动机时间延迟响应有关。分析中认为发动机推力对升力和力矩的贡献为零。
研究两种改善轨迹的方法,一种是俯仰姿态控制,另一种是油门杆控制。两者都与APCS系统有关。
APCS系统的目的在于维持飞行速度为所希望的值。当飞行轨迹改变时,为了维持速度近似为常数,必须调整推力来克服重力在飞行轨迹上的投影分量,这可用△θ对油门偏度的反馈环节来实现。其增益为:

速度反馈是用来控制推力从而使飞机轨迹稳定性达到适当的水平。其增益为:

图中给出了一种简化的APCS系统原理图。

 扫码下载APP
扫码下载APP
 科普中国APP
科普中国APP
 科普中国
科普中国
 科普中国
科普中国