

背景
结构振动控制是减小在地震和风荷载作用下结构物响应的有效措施。1结构振动控制包括四种形式:主动控制、被动控制、混合控制和半主动控制。目前,被动控制的研究成果已经广泛地应用于工程实际中,主动控制也已从理论研究步人工程实践。
随着研究的深人,人们开始探索一些新的结构振动控制方法,半主动结构振动控制引起了人们越来越多的注意。智能控制的理论研究和应用已经引起了人们的高度重视,如模糊控制、专家系统、神经网络、遗传算法等都得到了广泛的应用。
与传统的控制方法相比,智能控制可以更好地处理和解决结构振动控制中的时滞、鲁棒以及结构的非线性等问题。本文着重讨论变阻尼半主动结构控制,提出了基于RDRNN的变阻尼半主动结构控制遗传算法,应用多输人多输出动态递归神经网络模型RDRNN预测结构的响应,利用遗传控制算法进行变阻尼控制力寻优,实现了结构振动的变阻尼半主动最优控制。结构控制遗传算法,应用“染色体”字符串表示控制力,并在字符串转换为控制力的过程中考虑了变阻尼半主动控制力的不等式约束条件,通过“复制”、“交叉”和“变异”等操作,依据适应度函数来判断控制力的优劣,搜索最优控制力。
特点和不足半主动结构控制的特点是在不需要外部能源输人的情况下,控制装置能够依据结构的反应信息或外界荷载的激励信息主动地调节控制装置的工作状态以减小结构响应。与主动控制相比,由于不需要外部能源输人,因而避免了主动控制成本较高、系统工作的可靠性较难保证的缺点。不足之处是半主动控制的实现受到一些约束条件的限制,将已有的主动控制算法直接应用于半主动控制中并不适合。实现变阻尼半主动最优控制,并同时满足半主动控制力的约束条件,是一个急待解决的间题,世界各国的科学家正在进行相关的试验研究和理论探索2。
简介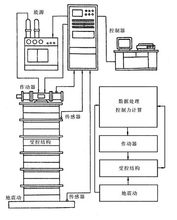
半主动控制是借助少许能量调节控制装置、通过改变振动体系刚度或阻尼特性实施反馈控制的技术。半主动控制亦称参数控制,其反馈控制原理与主动控制相同;然而,它并不直接向受控结构输入强大的机械能,控制装置一般为参数可调的被动装置。半主动控制有变刚度控制、变阻尼控制和变摩擦控制等多种。一些文献中常将半主动控制称为主动变刚度(或变阻尼)控制。
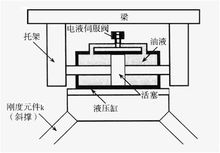
图1所示变刚度装置是设置在受控结构层间的一个变孔流体阻尼器。液压缸旁通回路上设有电磁阀开关。液压缸缸体由水平刚度为K的斜撑支撑于楼层下部;液压缸的活塞杆则与楼层上部固定连接。在水平地震动作用下,受控结构层间发生相对运动。此时,若调节电磁阀开关处于开启状态,液压缸内的油将由活塞带动经旁通回路自由流动,结构层间刚度不变。在忽略液流阻力的情况下,液压缸和支撑对结构振动没有影响;若考虑液流阻力,液压缸可视为阻尼器。相反,若调节电磁阀开关处于闭锁状态,由于油液不可压缩,活塞在液压缸内不能移动,此时结构层间必然增加水平刚度K。这样,只须按某种控制策略调节电磁阀的启闭状态,就可令结构体系在线改变刚度,达到控制地震反应的目标。电磁阀启闭所需的能量很小、可由电池供给。
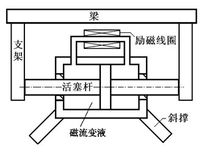
图2所示变阻尼装置是设置在结构层间的可调磁流变液阻尼器。
当结构层间发生相对运动时,缸体中的磁流变液将经旁通回路流动。改变旁通回路励磁线圈的磁场强度,磁流变液的性态将发生变化,产生不同的阻尼效应。故可根据控制体系的实测状态、按照某种控制算法调节磁场强度,增加阻尼耗能,达到减振目的。
半主动结构控制中模型算法控制的实现模型算法控制是在工业实践过程中独立发展起来的。其基本思想是先预测系统未来的输出状态,再去确定当前时刻的控制动作,即先预测,后控制,所以它明显优于先有信息反馈,再产生控制动作的经典反馈控制系统。它使用的是工业上易于获得的脉冲响应参数模型,在线反复优化计算、滚动实施,采用模型误差反馈进行校正,从而使得由于模型失配、时变、干扰等引起的不确定性得到补偿。适用于存在时滞、非线性、多输入多输出等特点的复杂系统。
半主动结构控制是当今土木工程结构控制研究领域的前沿课题之一。该控制系统一般以被动控制为主体,仅需要少量能量用于改变控制系统的参数或工作状态,以适应系统对最优状态的跟踪,其主要内容有主动变刚度系统和主动变阻尼系统等。
其工作原理如下:在地震或风震等外界荷载的作用下,建筑物会产生相应的振动响应,如果建筑物上装有可变阻尼器,则可根据建筑物振动的情况来对可变阻尼器进行控制,使其内部发生相对运动产生阻尼力,这个阻尼力会阻碍建筑物的振动。这就是一种附加阻尼力的控制策略,由于减少了共振的反应量,因此控制力并不象抵消输入方法那么大。
由于此系统很庞大复杂,而且又存在不确定性,使得参数模型不易获得,一些材料又有非线性等,传统的控制策略已不能满足其要求,而模型算法控制的几个优点正适用于解决此类问题。
常见的半主动结构控制系统常见的半主动控制系统有主动调谐参数质量阻尼系统(ATMD)、可变刚度系统(AVS)、可变阻尼系统(AVD),变刚度变阻尼系统(AVSD)等。
AVS系统的控制方式是通过由计算机控制的快速反应锁定装置来控制和改变系统的刚度,以此避开共振的影响,从而降低结构的反应。由于半主动控制装里只能增加结构的刚度,对于刚度己经很大的土木工程结构而言,为了能有效减小结构的动力反应就要求半主动变刚度系统的可变刚度比较大,这无疑使半主动变刚度系统的设计和应用带来了比较大的困难,换言之,半主动变刚度系统用于控制柔性结构的动力反应更加有效。
AVD系统是通过主动调节半主动变阻尼控制装置的阻尼力,使其等于或接近主动最优控制力,从而达到与主动控制接近的减震效果.半主动变阻尼控制装里可以连续改变阻尼力,具有控制宽频带激励振动的能力,包括半主动粘滞变阻尼器、半主动磁流变阻尼器、半主动电流变阻尼器、半主动压电变摩擦阻尼器等。
半主动变阻尼控制装置一般只能实现与速度有关的控制力,而不能像主动控制作动器那样能够同时实现与位移和速度有关的控制力,也正是这种限制使得半主动变阻尼控制总是稳定的。半主动变阻尼控制装置的最大阻尼力可以借助主动控制理论,预先确定主动最优控制力和控制效果,然后设计变阻尼装置的最大阻尼力等于相应的最大主动最优控制力。这样设计的半主动变阻尼装置在多大程度上可以实现主动最优控制力,从而在多大程度上接近主动最优控制的效果,取决于主动最优控制力时程有多大的比例与作动器所在结构层的层间速度相反。
 扫码下载APP
扫码下载APP
 科普中国APP
科普中国APP
 科普中国
科普中国
 科普中国
科普中国