

自动调谐控制的基本功能是通过马达驱动装置来调整射频系统的可变电容和电使射频系统工作在阻抗匹配最佳状态。自动调谐系统分为前级调谐和末级调谐。1
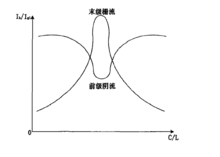
前级调谐原理发射机的高前级采用CTK12-1电子管,栅地电路,屏极槽路为并联谐振回路,负载是高末栅极电路,当高前屏极槽路处于谐振时,高前级的效率最高,屏极负载接近纯阻,并且此时前级阴流应为最小,高末栅流最大,根据这个原理设计前级的调谐逻辑。
方法:由于前级调谐回路Q值很高,谐振点很尖锐,要找准前级谐振点不是很容易。在程序设计时,采用先找到末级栅流的较大点,再找到前级阴流的最小点,并确认该点为谐振点。先将粗调时把前级马达回转一定量,确保在向正方向转动前级马达时一定能找到调谐点。在找末级栅流的最大值过程中,先将马达快速转动,等末级栅流从无到有时,再减慢马达的转动速度,利用小脉冲驱动前级马达,边驱动边比较,找到高末栅流较大值。此时已经在谐振点附近,然后寻找前级阴流最小值,通过读取前级阴流表值,进行比较,找到前级阴流最小点,即前级调谐谐振点,完成前级调谐过程。
发射机末级槽路采用三个π网络,3π网络用于实现谐振、阻抗变换、滤波功能。把输出阻抗变换为射频末级管所需的等效屏极阻抗,同时谐振于工作频率,滤除谐波。
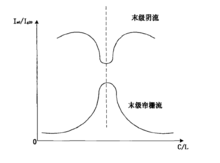
末级网络调整的器件较多,任何一个变化都讲影响末级网络的谐振点。理论上讲末级网络谐振时,高末电子管的负载接近纯阻,此时的末级阴流,帘栅流最大。在不考虑其他因素时,末级网络谐振时帘栅流最大和末级阴流最小将同时出现。在屏压10KV时,末级阴流在26-28A之间,功率在260KW 5KW左右,高功率屏压在13.7KV左右,末级阴流在39-41 A这时功率应在500KW 5KW,以上末级网络处于谐振状态时对应表值。通过对屏压、末级阴流、输出功率进行比较。如果调谐后数据与设置数据相近,即达到调谐点,末级调谐完毕。如果没有达到条件,发射机会从高功率降到10KV重新进行调谐。直到满足屏压13.7KV,末级阴流39-41A,输出功率500KW 5KW这三个条件。
5KW左右,高功率屏压在13.7KV左右,末级阴流在39-41 A这时功率应在500KW 5KW,以上末级网络处于谐振状态时对应表值。通过对屏压、末级阴流、输出功率进行比较。如果调谐后数据与设置数据相近,即达到调谐点,末级调谐完毕。如果没有达到条件,发射机会从高功率降到10KV重新进行调谐。直到满足屏压13.7KV,末级阴流39-41A,输出功率500KW 5KW这三个条件。
自动调谐控制算法可以自动确定热电制冷器器件的P(比例)、I(积分)、D(微分)的恰当值。对于每个期望的系统设定点,都将履行一次自动调谐过程。2510-AT自动调谐算法[1]将电压阶跃函数用于热电制冷器或珀耳帖效应器件。然后,抽取来自系统温度相应的信息,并用于改进的Ziegler-Nichols调谐技术,提供两个PID系数集合。一个集合是为最小温度超调量而优化,另一个集合为最小设定时间而优化。可以根据测试要求或器件限制,从两个集合中选择使用。如果需要的话,对系统响应进行微调时,还可以把这些数字用作起始点。
自动调谐控制的结构组成自动调谐控制共有两部分组成:一部分为逻辑控制系统,另一部分为调谐系统。
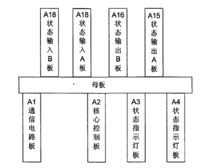
逻辑控制短波发射机逻辑控制采用两片EPM7512EAQI208作为核心处理器(一片负责所有的逻辑控制,一片负责与上位机通信),输入接口电路、输出接口电路、状态指示灯电路作为外部接口电路。由于控制器输入量、输出量及状态指示量都比较多,因此输入接口电路由输入接口电路板A,输入接口电路板B组成,输出接口电路由输出接口电路板A、输出接口电路板B组成,状态显示由状态显示电路板A、状态显示电路板B组成,核心控制板负责逻辑控制及外围电路控制、通信电路板负责与上位机通信。输入接口电路板A上共有54路输入信号,输入接口电路板B上共有50路输入信号,为了增强抗干扰性能,用光电耦合器将输入信号分成系统内与系统外两部分,系统内高电平为++3.3V,系统外高电平为+24V,并且系统内与系统外的地隔离;输出接口电路板A上有40路输出信号,输出接口电路板B上有26路输出信号,设计原理与输入信号相同。
A1-CPLD通信板
A2-CPLD核心板
A3一状态指示灯板
A4-一状态指示灯板
A 15-输出板A
A 16-一输出板B
A 17-输入板A
A 18--输入板B
逻辑控制器的各功能板插在一个母版上,A1~A4板插在母版前面,A14~A17板插在母版后面。实际板卡连接如图。
调谐控制是发射机核心控制的一部分,主要负责发射机的自动调谐部分。
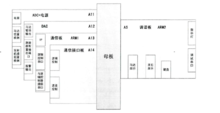
调谐控制与逻辑控制在一个插箱内,各功能板插在一个母板上,A5板插在母版前面,A11-A14板插在母版后面。
A5——信号板控制板
A11—— A/D板
A12——D/A板
A13——调谐控制板
A14——通信接口板
以发射机为例,发射机自动化调谐控制示意框图如图所示。
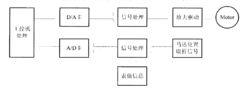
调谐时,工业计算机先根据预先保存好的基础数据,进行分析计算,得到所要开出频率的初步位置,通过D/A卡送出电平快速将各路马达驱动到位置附近,同时通过A/D卡回读各路马达当前的位置。初始驱动到位后,合上高压,按照软件设计好的逻辑顺序,边读取表值数据分析判断,边驱动相应马达进行调谐,逐步完成模拟人工调谐的过程,最终完成人工调谐的所有操作。
调谐过程中关键问题是精确驱动马达到位,达到精确调谐的目的。由于发射机使用的8路马达均为模拟电机,而调谐精度要求较高,故此采用何种控制方式非常关键。
在控制过程中,兼顾速度与精度要求,采用了马达粗调和精细调谐相结合的方法。工业计算机首先经过基础数据分析,得出马达初步要到达的位置,采用粗调方式,即输出较大的马达驱动信号,使马达快速达到调谐点附近,然后采用精细调一谐方法,即依据设定好马达力度(D/A卡输出电平大小)与步长(D/A卡输出时间长短),输出马达驱动信号,同时依据读取的表值进行马达位置调整,达到精确调谐的目的,此过程采用脉冲驱动精细调谐方法IPC处理时,通过读取A/D卡的表值信息及马达位置信息,判断后发出马达驱动信号,经D/A卡转换和信号处理,控制马达驱动电路,及相应运转,不断模拟人工调谐过程,循环操作,实现精确调谐控制。2

 扫码下载APP
扫码下载APP
 科普中国APP
科普中国APP
 科普中国
科普中国
 科普中国
科普中国