

多参数控制
历来用模拟调节器进行控制时,除了对应一个控制变量选择一个操作变量以外,也可控制多个独立单环所组成的过程,从而对整个过程进行控制。但是生产过程在本质上是多参数系统,而且变量之间有种种影响。因此,在设计控制系统时,要尽可能避免互相影响。为了避免互相影响使控制性能变坏,对于有些即使本来需要控制的变量也宁可放弃而不控制。这样就不可避免地要出现所谓“失控”现象。例如,在蒸馏塔的控制系统中,对塔顶或塔底的任何一个组成部分进行自动控制时,就可以发现还存在有不能进行自动控制的“失控”等现象。1
近年来,在化工生产过程中,设备间的互相影响正在显著增加。因此,一个操作变量会影响到许多控制变量。再有,一个控制变量也能支配受许多操作变量影响的,作为多参数系统的整个控制过程。想要在控制过程中消除影响,必须同时把许多参数综合起来加以控制,这样的控制方式,就是多参数控制。
在以前,多参数控制系统必须要安装许多调节器及运算器才能进行控制,仅在某些特殊的情况下使用。但是,随着DDC直接数字控制系统的普及,多参数控制系统实现起来也就更加经济了。
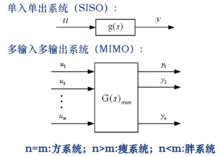
简介具有一个以上输入或一个以上输出的系统,在那里任一输入的变动产生来自一个以上输出的一个响应,叫做多参数系统。一般说来,会有m个输入和l个输出,如图所示。如果了l=m,这系统叫做方形系统。

如果任一输入的变动产生来自一个以上输出的一个响应,那么这是由于系统中某种内部耦合或传输通路引起的,通常,当处理一个特定输入时,一个特定的系统输出端会比其他输出端起更大的响应,其他输出端对这个物入变动的响应叫做交互作用。
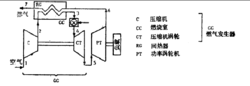
各个方面都出现多参数系统,例如电气,机械和化学工程,经济,医学工程,管理系统和环境系统.(来自热力学领域的)多参数系统的一个例子是汽车用双轴式气轮机.它有一组装在功率锅轮机进气端的可变几何形状的喷嘴,如图中的方框示意图所示,这个系统具有燃料流量、功率涡轮机喷嘴角度两个独立输入和必须控制的燃气发生器速度、功率涡轮机进气口温度两个输出变量。操纵任何一个输入都产生两个输出的变化。
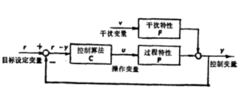
不互相影响的控制研究一下下图的反馈控制系统。假设其中:
y——控制变量矢量;
a——操作变量矢量;
u——干扰变量矢量;
r——目标设定变量矢量;
P——过程特性矩阵
F一干扰特性矩阵 矩阵的元素gij,fij,cij是传递函数.
C——控制算法矩阵。
状态控制上一节叙述了不互相影响的控制,不互相影响的控制并不是最佳控制,另外,对于外来干扰的控制也比较困难。因此,目前关于多参数控制系统,又提出了种种控制方式·这些控制方式既利用了系统的外部变量,也利用了系统的内部状态变量,并且,在控制过程中做到不互相影响,从而获得良好的控制性能。在这些控制方式中,这里主要阐述高桥提出的关于DDC多参数控制系统的设计方法。在多参数控制过程中加上反馈,构成串级系统,适当地选择反馈环节,既可改善整个系统的动态特性,又便于对整个系统加以控制。基于这些考虑,因此,可在线性控制对象的模态域中决定控制算法矩阵.这里的模态域,是指线性控制对象的矩阵为了Jordan棕准型的状态空间。
研究一下用以下的公式所裘示的n阶线性定常控制对象:
现在研究图所表示的串级控制系统。亦即,从影响内部状态变量的p中检测出必要的信息y,然后用第2个闭环控制矩阵尺来进行反馈控制,实际上想要控制的控制变量,通过主反馈回路与设定值相比较,从而得到主控制矩阵的输入,主控制器的输出m成为第2个反馈回路串联起来构成串级控制。
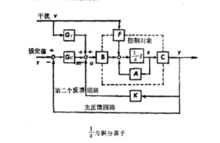
如果主反馈回路所操纵的控糊变量以外的变量,还有可以作为y被检测出来,并可通过K进行反馈的,则形成所谓利用控制变量以外的状态变量而进行的控制。
多参数频域控制理论用频域法研究多参数控制系统 的分析与设计的科学。现代控制理论的重要分支学 科。研究对象为多输入、多输出控制系统。该理论是 把一个多输入-多输出、回路间紧密关联的系统设 计,转化为一组单变量系统的设计,进而可选用某一 种古典方法 (如奈奎斯特和伯德的频率响应法、伊万 斯的根轨迹法等) 完成多参数系统的设计。
多参数频域控制理论主要研究如何将频率响应法 推广到多参数控制系统设计。其主要设计理论包括: 罗森布洛克 (Rosenbrock) 的逆奈化阵列法、梅奈 (Mayne) 的序列回差法、麦克法兰 (Macfarlane) 的特征轨迹法、欧文斯 (Owens) 的并矢展开法等。 由于频域设计要依赖大量图形信息,且设计过程要反 复多次才能完成,因此,计算机辅助设计 (CAD) 是多参数频域理论重要的组成部分和研究内容。目 前,这一理论正在向纵深方向发展。
线性多参数系统理论研究线性多参数系统描述、性质及分析与设 计方法理论的科学。现代控制理论的理论基础,其研 究对象为线性多输入、多输出系统。
线性多参数系统理论主要研究内容包括:
①线性 多参数系统数学描述理论,含系统输入-输出描述、 状态变量描述和多项式矩阵描述以及各种描述之间的 关系;
②线性多参数系统分析理论,包括系统的可控 性、可观测性及稳定性等;
③线性多参数控制系统设 计理论,包括状态反馈、状态估计及补偿器的理论和 设计方法;
④线性多参数系统实现理论等。近30年来,这一理论已日趋完善,但仍在不断发展,正在将 这一理论推广应用到分布系统; 并研究设计理论所用 算法的稳定性、良态及病态问题,以及系统的物理约 束与最优化和灵敏度等问题。
多参数非线性控制理论随着科学技术的发展,人们对实际生产过程的分析要求日益精密,各种较为精确的分析和科学实验的结果表明,任何一个实际的物理系统都是非线性的。所谓线性只是对非线性的一种简化或近似,或者说是非线性的一种特例。如最简单的欧姆定理。
欧姆定理的数学表达式为U=IR。此式说明,电阻两端的电压U是和通过它的电流I成正比,这是一种简单的线性关系。但是,即使对于这样一个最简单的单电阻系统来说,其动态特性,严格说来也是非线性的。因为当电流通过电阻以后就会产生热量,温度就要升高,而阻值随温度的升高就要发生变化。
简介非线性控制理论作为很有前途的控制理论,将成为二十一世纪的控制理论的主旋律,将为我们人类社会提供更先进的控制系统,使自动化水平有更大的飞越。
控制系统有线性和非线性之分。严格地说,理想的线性系统在实际中并不存在。在分析非线性系统时,人们首先会想到使用在工作点附近小范围内线性化的方法,当实际系统的非线性程度不严重时,采用线性方法去进行研究具有实际意义。但是,如果实际系统的非线性程度比较严重,则不能采用在工作点附近小范围内线性化的方法去进行研究,否则会产生较大的误差,甚至会导致错误的结论。这时应采用非线性系统的研究方法进行研究。
非线性系统的分析方法大致可分为两类。运用相平面法或数字计算机仿真可以求得非线性系统的精确解,进而分析非线性系统的性能,但是相平面法只适用于一阶、二阶系统;建立在描述函数基础上的谐波平衡法可以对非线性系统作出定性分析,是分析非线性系统的简便而实用的方法,尤其在解决工程实际问题上,不须求得精确解时更为有效。
实际系统中的非线性因素实际的物理系统,由于其组成元件总是或多或少地带有非线性特性,可以说都是非线性系统。例如,在一些常见的测量装置中,当输入信号在零值附近的某一小范围之内时,没有输出,只有当输入信号大于此范围时,才有输出,即输入输出特性中总有一个不灵敏区(也称死区),放大元件的输入信号在一定范围内时,输入输出呈线性关系,当输入信号超过一定范围时,放大元件就会出现饱和现象,各种传动机构由于机械加工和装配上的缺陷,在传动过程中总存在着间隙,其输入输出特性为间隙特性,有时为了改善系统的性能或者简化系统的结构,还常常在系统中引入非线性部件或者更复杂的非线性控制器。通常,在自动控制系统中,最简单和最普遍的就是继电特性。
常见非线性特性对系统运动的影响从非线性环节的输入与输出之间存在的函数关系划分,非线性特性可分为单值函数与多值函数两类。例如死区特性、饱和特性及理想继电特性属于输入与输出间为单值函数关系的非线性特性。间隙特性和一般继电特性则属于输入与输出之间为多值函数关系的非线性特性。
在实际控制系统中,最常见的非线性特性有死区特性、饱和特性、间隙特性和继电特性等。在多数情况下,这些非线性特性都会对系统正常工作带来不利影响。下面从物理概念上对包含这些非线性特性的系统进行一些分析,有时为了说明问题,仍运用线性系统的某些概念和方法。虽然分析不够严谨,但便于了解,而且所得出的一些概念和结论对于从事实际系统的调试工作是具有参考价值的。
优特点同单变量系统相比,多参数系统的控制复杂得多。
多参数系统(multivariable systems)是指具有多个输入量或输出量的系统,又称多输入多输出系统。
在多参数控制系统中,被控对象、测量元件、控制器和执行元件都可能具有一个以上的输入变量或一个以上的输出变量。例如汽轮机的蒸汽压力和转速控制,石油化工生产中精馏塔的塔顶温度和塔底温度控制,涡轮螺旋桨发动机转速和涡轮进气温度的控制等,都是多参数系统的控制问题。多参数系统不同于单变量系统,它的每个输出量通常都同时受到几个输入量的控制和影响,这种现象称为耦合或交叉影响。交叉影响的存在使多参数系统很可能成为一种条件稳定系统。例如,在调试或运行过程中若增益发生变化或某一元件(例如传感器)断开或失灵,就可能导致不稳定。这是多参数系统特有的问题。在多参数控制系统的设计中,对于交叉影响的处理,常采用两种方式:①通过引入适当的附加控制器,实现一个输入只控制一个输出,称为解耦控制(见解耦控制问题);②协调各个输入和输出间的关系,使耦合的存在有利于改善系统的控制性能,称为协调控制。此外,也可采用其他形式的指标来设计多参数系统的控制器。(见线性系统理论)2
优点:
1)集中控制便于维护
2)由表头到单表头降低数据误差
多参数系统的结构特点如图所示:

 扫码下载APP
扫码下载APP
 科普中国APP
科普中国APP
 科普中国
科普中国
 科普中国
科普中国