

主动控制
从20世纪70年代开始,在飞机设计中采用一种新的技术——主动控制技术ACT。按这种思想设计飞机的过程,也就是在飞机设计的初始阶段,根据对飞机的性能要求,综合考虑飞行控制、气动力、结构和发动机的设计和选型,并通过充分发挥飞机控制的主动性和潜力,协调和解决所产生的矛盾,使飞机具有最佳性能;于是,飞机控制在飞机的总体设计中,由原来的被动作用转变为主动作用,因而被人们称为主动控制技术。
定义从20世纪70年代开始,在飞机设计中采用一种新的技术——主动控制技术ACT。按这种思想设计飞机的过程,也就是在飞机设计的初始阶段,根据对飞机的性能要求,综合考虑飞行控制、气动力、结构和发动机的设计和选型,并通过充分发挥飞机控制的主动性和潜力,协调和解决所产生的矛盾,使飞机具有最佳性能;于是,飞机控制在飞机的总体设计中,由原来的被动作用转变为主动作用,因而被人们称为主动控制技术。
从飞机的设计角度来说,主动控制技术就是在飞机设计的初始阶段,考虑飞行控制系统对飞机总体设计的影响,充分发挥飞行控制潜力的一种飞机设计技术。
从飞行控制角度来说,主动控制技术就是在各种飞行状态下,通过飞行控制系统使作用在飞机上的气动力按照需要变化,从而使飞机性能达到最佳,并使成本、使用费用降低的一种飞行控制设计技术。
过去把这种飞机设计技术称为随控布局CCV。目前,广泛采用的说法是主动控制技术,而随控布局仅是主动控制技术在飞机设计中的具体应用。
主动控制技术的发展主动控制技术是20世纪60年代中期首先在美国发展的一种飞机设计技术。60年代中期,美国空军的战略思想发生了重要变化,从原来的“要导弹不要飞机”,变为要发展机动性好的“空中优势”战斗机,并且认为要使战斗机的机动性有更大的改善,最有希望的突破口就是主动控制技术。此外,从50年代后期开始,现代控制理论和计算机技术的迅速发展也为主动控制技术发展奠定了基础。在那些年代,空气动力学发展也很快,出现了许多新的飞机气动布局方案,经过试验,对这些新布局飞机特性也有了深入的了解,从而为主动控制技术在飞机设计中的应用创造了条件。
在上述需求和技术条件的基础上,从20世纪70年代开始,世界很多航空工业发达国家都相继开展了主动控制技术的验证工作。美国在发展主动控制技术方面一直处于领先地位。
我国从1978年秋成立主动控制规划组以来,在有关研究所、工厂和学校的合作下,不仅对ACT进行了理论方法的研究,而且完成了验证机的试飞验证,取得了可喜的成果。
并行控制在计算机网络中,由于有多个主机,因此,可以运行更多的用户进程。然而这些进程可能为一共享资源而竞争。为了解决这种竞争就必须首先对发出占用此资源请求的进程进行排队。根据排队依次共享该资源。
当多个用户同时对数据库进行查询、更新等操作时,为保证这些并行操作的正确执行和保持数据库的完整所实施的控制。
在计算机网络中,由于有多个主机,因此,可以运行更多的用户进程。然而这些进程可能为一共享资源而竞争。为了解决这种竞争就必须首先对发出占用此资源请求的进程进行排队。根据排队依次共享该资源。这就需要应用并行控制的办法。1
其次,为了在网络上实现并行控制,就必须使网络上参与实现某一功能的所有进程皆能获得与该功能相关的一致的系统状态。并且不必访问一个全网唯一的集中系统数据库。所有描述全网系统状态的信息均被保存在一个分布式系统数据库中,并且由所有参加实现系统功能的进程通过相互通讯来使全网系统的状态保持一致。
系统数据库可以是完全被分割的。也就是说,分布在各个主机上的数据库都只是系统数据库的一部分。并且相互之间都不相同。
系统数据库也可以多拷贝的形式分布在多个主机上。
此外,还可以以部分多拷贝方式分布在多个主机上。也就是说,每一主机上的数据库都是系统数据库的一部分,但这些部分之间有相重复的部分。
分布数据库的一致性要实现主动并行控制,就必须保持系统数据库多拷贝部分的一致性。因为只有这样才能使网络上各个进程通过系统数据庠所观察到的状态是一致的,也才谈得上实现各相关进程之间的同步运行。
所渭分布数据库的一致性,实际上包含有两方面的含义义。一是多拷贝之间的相互一致性,二是每一个数据库拷贝内部的一致性。
所谓相互一致性就是说,这些多拷贝相互之间是相同的,但是,应当指出的是:在网络上,由于通讯的延迟,因而要求每一时刻都能使这些多拷贝保持一致是很困难的。比较合理的要求是。在适当的访问数据库操作完成后,多个数据库多拷贝之间应当保持一致。
分布数据库的内部一致性本身又有两个方面的含义。
保持语义完整性的一致性。由于数据库所反映的是客观世界的某些事物。因此;数据席内部的数据之间常常存在着反映这些事物的关系(例如,在航空预约系统的数据麾库中,每一航班的已订机票数,未预定的机票数,及该航班的总座位数之间的关系是:该航班的总坐位数=已订票数+未定的机票数),这就是所谓数据的语义完整性。
因此,在数据库上所进行的操作应当不要破坏这种语义的完整性。否则便不反映客观实际情况。但是,要判断那一种操作是否能保持语义的完整性,显然与具体的应用有关。
在事务处理的调度中保持内部一致性。一个原子事务显然可以保证数据库内部的一致佳。这是因为原子事务就意味要么完全不执行这个事务,要么执行完这个事务,因此它不会破坏数据库内部的一致性。但是,如果有多个事务在多个主机上都要对此数据库进行库操作,采用完全串行调度固然可以保证数据库内部的一致性。但这会大大降低分布系统的效率。为了提高效率可以让多个并行事务相互穿插进行以便在效果上相当子多个原子事务串行执行。
因此也就可以既保证多个事务并行运行,又保证了数据库内部的一致性。可是,怎样实行这种可串行化的多事务调度呢?应当谨慎行事,因为,如果调度不当,把读在前和写在后的操作顺序改成为写在前和读后的顺序,那就会造成数据库内部的不一致。
主动并行控制技术的主要功能目前,在飞机上可实现的主动控制技术功能主要包括以下各项:
放宽静稳定性RSS、边限控制BC、直接力控制DFC、阵风载荷减缓GLA、乘座品质控制RQC、机动载荷控制MLC、颤振模态控制FMC。
按照主动控制技术设计的飞机,通常都具有以下特点:
这种飞机是放宽静稳定的或本身就是静不稳定的,需要通过控制增稳实现人工稳定和保证飞机具有期望的飞行品质。
电传操纵系统是实现各种主动控制功能的物质基础。
从气动布局来讲,主动控制飞机均采用多个操纵面,除三个常规的主操纵面外,通常还使用一些辅助操纵面。
主动控制飞机的驾驶舱布局和仪表显示也与普通飞机不同。2
主动并行控制方法在主动并行控制中,单片机用数条输出口线直接去控制步进电动机各相绕组的驱动线路。很显然,电机功率接口中不包含环形分配器,环形分配器的功能必须由单片机来完成。而单片机实现脉冲分配器的功能又有两种方法,一种是纯软件方法,即全部用软件来实现相序配,直接输出各相导通或截止的信号。另一种方法是软件与硬件结合的方法,下面分别以电视机为例予以介绍。3
纯软件方法在这种方法中,单片机输出口直接与功率接口耦合,环形分配器的功能全部由软件来完成。如图是其示意图。8031的P1.0~P1.4 五条输出线输出相应的电机状态:AB—ABC—BC—BCD—DC—CDE—DE—DEA—EA—EAB—AB,这称为五相十拍运行状态。这种纯软件方法,需要在内存ROM区域开辟一个存储空间来存放这10种输出状态。
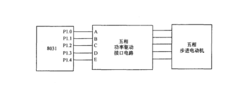
系统软件按照电机正、反转的要求,按正、反顺序依次将状态表的内容取出来并送至8031的输出口。
例如,在程序存储器OFFOH开始用lO个字节存储五相反应式步进电动机的五相十拍工作状态表,并设低电平导通,高电平截止,则存储状态表的地址内容如表。
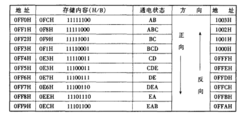
采用上述程序实现反转,可省去状态表中地址为0FFAH一1003H的部分,而且可以采用同一个计数器指针R0,在正转任意步后接着反转时,用不着为了避免乱步而调整指针的位置。
用纯软件方法代替脉冲分配器是比较灵活的。例如要求用8031的P1口输出A、B、C、D四相脉冲,以控制四相混合式步进电机,则可采用更简单的方法如下:
假定门口线为低电平时绕组通电,并用Pl口的P1.1、P1.3、P1.5、P1.7分别驱动A、B、C、D四相功率接口,则四相八拍的工作状态可安排。4
软、硬件结合的方法软、硬件结合的方法可进一步减少单片机的工作时间占用,更有利于实现多台步进电动机的联动控制。如图是两台步进电动机联动控制系统的示意图。在这种方法中,8031以P1.0~P1.3四条数据线接到多个EPROM的低四位地址线上,可选通每个EPROM的16个地址,也即16种状态。EPROM的低位数据输出线作为步进电动机A、B、C,D各相的控制线。EPROM作为一种解码器,解码器的输人输出关系可以设计得更加有利于微机控制。例如如下对应关系:
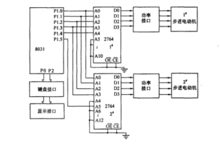
这种方法只需对计数器进行加1操作,然后送Pl口;环形分配器的功能不用主机负担,不再需要串行控制中的延时,软件开消减少。
Pl口的高位线,按线选法,选择不同的EPROM,也即选择不同的步进电动机。P1口高四位,最多可线选四台步进电动机联动控制。分别选通1#和2#EPROM及相应的步进电动机。
步迸电动机开环变速控制控制步进电动机的转速,实际上就是控制转换电机通电状态的时间长短。有两种基本方法,一种是软件延时,另一种是定时器定时。
1.软件延时方法
这种方法在每次转换电机通电状态(简称换向)后,调用一个延时子程序,待延时结束后,再次执行转换状态子程序。如此反复使电机按某一确定转速运转。执行下面程序将控制电机正向连续旋转。
2.定时器延时的方法
不同的单片机有不同数量的片载定时器/计数器。利用其中某个定时器,加载和溢出产生中断信号,终止主程序的执行,转向执行定时器中断服务程序,来产生硬件延时的效果。若将电机换相子程序放在定时器中断服务程序:之中,则定时器每中断一次,电机就换相一次,从而实现对电机的速度控制。

 扫码下载APP
扫码下载APP
 科普中国APP
科普中国APP
 科普中国
科普中国
 科普中国
科普中国