

简介
 自古以来,波涛汹涌的海洋,强烈地吸引着人们。在人们的幻想中,海洋深处有龙王居住的宫殿,有珍奇的蓝宝石,在皎洁的月夜,美人鱼会从浪花中涌现出来,唱起动人的歌……。
自古以来,波涛汹涌的海洋,强烈地吸引着人们。在人们的幻想中,海洋深处有龙王居住的宫殿,有珍奇的蓝宝石,在皎洁的月夜,美人鱼会从浪花中涌现出来,唱起动人的歌……。
在揭开海洋秘密的历程中,潜水船(艇)是首届一指的尖兵。它既能象普通轮船那样,在海面上破浪航行,也能象鱼那样潜入水中,在水下行动自如。
对于潜水船为什么能下又能上,我们从鱼的浮沉谈起。绝大多数的鱼都有一种本领:体积能大也能小(图1)。需要下沉时,体积变小;上浮时体积变大;悬在水中,体积变得使浮力与重量一样大。它们所以具有这种本领,是因为鱼肚里有鱼鳔。鱼鳔上有气腺,它能把溶解在血液里的气体抽进鱼鳔,使鱼鳔的体积变大,鱼的躯体向外凸出;也能把鱼鳔里的气体送回血液,鱼的体积于是变小。
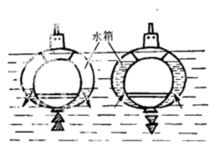 能下能上的潜水船,同大多数鱼有些相似,它也有“鱼鳔”,这就是外壳和内壳之间的水箱(图2)。当打开水箱的闸门,使海水进入水箱时,潜水船的重量增加,便向下沉;当重量与浮力相等时,潜水船就悬浮在水中,:不下也不上;用高压空气把海水从水箱里排出去,当潜水船的鲨蜇小于浮力时,它就向上浮。
能下能上的潜水船,同大多数鱼有些相似,它也有“鱼鳔”,这就是外壳和内壳之间的水箱(图2)。当打开水箱的闸门,使海水进入水箱时,潜水船的重量增加,便向下沉;当重量与浮力相等时,潜水船就悬浮在水中,:不下也不上;用高压空气把海水从水箱里排出去,当潜水船的鲨蜇小于浮力时,它就向上浮。
潜水船和大多数鱼在浮沉原理上稍微有些不同,鱼是靠改变体积从而改变浮力来实现浮沉的;潜水船是改变重量来实现浮沉的。
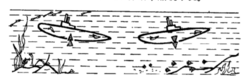
潜水船在水面下航行,还可以利用升降舵来实现浮沉。平时,升降舵的叶面在水平位置。当前部的升降舵的叶面上倾、后部升降舵的叶面下倾时(图3),水流经过升降舵便产生一个向上的升力,使潜水船上升。相反,当前部升降舵的叶面下倾、尾部升降舵的叶面上倾时,潜水船就下沉。
 普通的潜水船约能下潜数百米。而海洋的平均深度为3795米。在同大自然的斗争中,人类还设计、制造了各种类型的深潜艇。
普通的潜水船约能下潜数百米。而海洋的平均深度为3795米。在同大自然的斗争中,人类还设计、制造了各种类型的深潜艇。
有一种深潜艇很有趣(图4),内部是一只由特殊钢材制成的十分坚固的座舱,用于载人和安放各种测量仪表。座舱的外面是一只用轻铝合金制成的浮体。它和座舱之间充满比水轻的汽油,深潜艇便能悬浮在海水中。浮体的上部有排油孔,下面设有进水口一一10000米深的水压力,可使汽油的体积减少10%左右,而水只能减少5%,有了进水口,可以使浮体在任何深度都能保持一定的形状。还有许多金属小球用电磁铁固定在浮体的圆筒内。
 这种深潜艇的原理是很简单的:用断电的方法丢掉一些金属小球,重量就减轻,于是向上升;放掉一些汽油,海水涌入浮体内,便向下沉。
这种深潜艇的原理是很简单的:用断电的方法丢掉一些金属小球,重量就减轻,于是向上升;放掉一些汽油,海水涌入浮体内,便向下沉。
1960年1月23日,有一只叫“的里雅斯特号”的上述类型的深潜艇,曾到达海洋最深的沟——美国关岛北面的马利亚纳海沟。这条海沟全长2000多公里,平均深度7000多米,如果把珠穆朗玛峰搬到这里最低凹的地方,不仅没顶,而且峰顶还在洋面之下二千多米!1
潜水船任务同宇宙飞船一对比,就容易了解到潜水船的目的。
以阿波罗11号为例,宇宙飞船的最终目的是在月球表面着陆,对月球进行科学调查、并取回样品。同时,在飞行过程中,对地球用围状态进行科学调查、观测太阳、进行月球周围状况和月球表面情况的观察等,完成各种各样的科学计测和样品收集作业。以百闻不如一见的态度,了解未知的宇宙空间这个对手,是首要目的。第二个目的大概就是实现阿波罗计划以后的计戈,积极地利用宇宙,争取在月球表面建立永久性基地,以扩大人类的生活空间。
潜水船的目的与此类同。当前的目的是乘潜水船进行海中和海底的科学观测,必要时致力于收集和取回样品。观测海流流速、流向、水温、盐度、浮游生物密度、鱼群分布等。至于海底的问题,则是以海底地形、土壤、海底动植物等为对象的。
当前最重要的是,探索沉睡在海底的石油和矿物等有用的矿物资源。旨在加深对海洋本身理解的科学观测和通过肉眼进行的观察,可以通过乘坐潜水船直接潜入海中,取得令人满意的成果,如果只利用过去那种海洋调查船之类的间接方法,难免令人有隔靴搔痒之感觉。
潜水船的第二个目的是进行海中和海底作业。为了进行海底居住和建筑海中结构物、采掘矿物资源、支援捕渔业、建立和维修海底农场等各种海中作业,都需要使用潜水船。
沉睡在海底的庞大矿物资源、能从农牧化鱼场获得的丰富粮食资源以及可以无限利用的能源资源,这三者中任何一种的获得,不利用潜水船就无法彻底进行开发。2
潜水船构成——军用潜艇 主要由艇体、操纵系统、动力装置、武器系统、导航系统、探测系统、通信设备、水声对抗设备、救生设备和居住生活设施等。
主要由艇体、操纵系统、动力装置、武器系统、导航系统、探测系统、通信设备、水声对抗设备、救生设备和居住生活设施等。
艇体双壳潜艇艇体分内壳和外壳,内壳是钢制的耐压艇体,保证潜艇在水下活动时,能承受与深度相对应的静水压力;外壳是钢制的非耐压艇体,不承受海水压力。内壳与外壳之间是主压载水舱和燃油舱等。单壳潜艇只有耐压艇体,主压载水舱布置在耐压艇体内。一个半壳潜艇,在耐压艇体两侧设有部分不耐压的外壳作为潜艇的主压载水舱。
潜艇艇体多呈流线型(先进的潜艇一般设计成水滴形或者雪茄形),以减少水下运动时的阻力,保证潜艇有良好的操纵性。
耐压艇体内通常分为艏、舯、艉三大段,分隔成3~8个密封舱室,舱室内设置有操纵指挥部位及武器、设备、装置、各种系统和艇员生活设施等,以保证艇员正常工作、生活和实施战斗。现代潜艇在艏段安装有大型球形声纳基阵和鱼雷舱,在鱼雷舱内一般安装有4-8具533-650mm鱼雷发射管。舯段有耐压的指挥室和非耐压的水上指挥舰桥。在指挥室及其围壳内,布置有可在潜望深度工作的潜望镜、通气管及无线电通信、雷达、雷达侦察告警接收机、无线电定向仪等天线的升降装置。艉段主要安装有动力装置和传动装置。在艇身两侧一般还安装有声纳基阵。3
动力装置柴电动力
最早期曾经尝试过做为潜艇动力来源的有压缩空气、人力、蒸气、燃油和电力等等。而真正成熟的第一种潜艇动力来源是以柴油机配合电动马达(柴电)做为共同的动力来源。
第一次世界大战之前,潜艇开始使用柴油机配合电动马达作为潜艇的动力来源。这种动力是第一种潜艇用机械动力。柴油机负责潜艇在水面上航行以及为电瓶充电的动力来源,在水面下,潜艇使用预先储备在电瓶中的电力航行。由于电瓶所能够储存的电力必须提供全舰设备使用,即使采取很低的速度,也无法在水面下长时间的航行,必须浮上水面充电。后来出现的呼吸管则使得潜艇的潜航能力增加。
呼吸管在第二次世界大战前由荷兰开发出来,其后由德国进一步的改良并首先使用在他们的潜艇上面。呼吸管的基本构造很简单,就是一个可以伸长的通气管,将外界的空气引导至柴油引擎,产生的废气也经由呼吸管排送出去,另外再附加防止海水进入以及将进入的海水排除的管线。通过使用呼吸管可以让潜艇在潜望镜深度情况下使用柴油机,这样潜艇就不必上浮即可补充电力。呼吸管的使用大幅改变当时潜艇的作业方式与弹性。在使用呼吸管以前,潜艇一定要浮出海面进行换气和充电的作业,而这个作业时间限制在夜间。采用呼吸管之后,潜艇只需要将呼吸管伸出海面就得以进行充电的工作,不仅降低潜艇被发现的机率,也扩展潜艇可以充电的时机。
针对这个威胁,盟军是利用巡逻机携带的特殊雷达来寻找微小的呼吸管,即使无法击沉潜艇,至少也要迫使它无法充电而没有能力持续的追踪与攻击。
核动力
 核动力是继柴电动力之后发展的又一种动力。核动力的原理是通过核子反应炉产生的高温让蒸汽机中产生蒸气之后驱动蒸气涡轮机,来带动螺旋桨或者是发电机产生动力。最早成功在潜艇上安装核子反应炉的是美国海军的鹦鹉螺号潜艇,全世界公开宣称拥有核子动力的国家有5个,其中以美国和俄罗斯的使用比例最高。美国甚至在1958年宣布不再建造非核动力潜艇。
核动力是继柴电动力之后发展的又一种动力。核动力的原理是通过核子反应炉产生的高温让蒸汽机中产生蒸气之后驱动蒸气涡轮机,来带动螺旋桨或者是发电机产生动力。最早成功在潜艇上安装核子反应炉的是美国海军的鹦鹉螺号潜艇,全世界公开宣称拥有核子动力的国家有5个,其中以美国和俄罗斯的使用比例最高。美国甚至在1958年宣布不再建造非核动力潜艇。
核动力潜艇相比于传统的柴电潜艇,具有动力输出大,动力续航高(由于核动力潜艇的燃料的补充更换通常在10年以上,相比于仅仅几周或几月的柴电动力潜艇要大大增加,所以也通常被视为无限续航),速度快等优点。但核动力潜艇却有技术难度大,稳定性差,建造费用高,噪音大以及维护要求高的缺点。核电池的出现,解决了这些问题,意味着可以批量的制造超越常规性能的潜艇。
操纵系统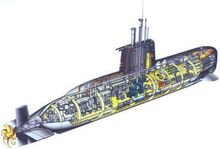 用于实现潜艇下潜上浮,水下均衡,保持和变换航向、深度等。潜艇主压载水舱注满水时,增加重量抵消其储备浮力,即从水面潜入水下。用压缩空气把主压载水舱内的水排出,重量减小,储备浮力恢复,即从水下浮出水面。艇内设有专门的浮力调整水舱,用于注入或排出适量的水,以调整因物资、弹药的消耗和海水密度的改变而引起的潜艇水下浮力的变化。艇首、艇尾还设有纵倾平衡水舱,通过调整首、尾平衡水舱水量以消除潜艇在水下可能产生的纵倾。艇首(或指挥室围壳处)和尾部各设有一对水平升降舵,用以操纵潜艇变换和保持所需要的潜航深度。艇尾装有螺旋桨和方向舵,保证潜艇航行和变换航向。
用于实现潜艇下潜上浮,水下均衡,保持和变换航向、深度等。潜艇主压载水舱注满水时,增加重量抵消其储备浮力,即从水面潜入水下。用压缩空气把主压载水舱内的水排出,重量减小,储备浮力恢复,即从水下浮出水面。艇内设有专门的浮力调整水舱,用于注入或排出适量的水,以调整因物资、弹药的消耗和海水密度的改变而引起的潜艇水下浮力的变化。艇首、艇尾还设有纵倾平衡水舱,通过调整首、尾平衡水舱水量以消除潜艇在水下可能产生的纵倾。艇首(或指挥室围壳处)和尾部各设有一对水平升降舵,用以操纵潜艇变换和保持所需要的潜航深度。艇尾装有螺旋桨和方向舵,保证潜艇航行和变换航向。
如果艏水平舵在舰桥(指挥室)多数是大型的核潜艇,也有少数常规潜艇艏水平舵拥有此布局。3
推进系统不依赖空气推进系统
AIP是 (Air-IndependentPropulsion) 的简称,中文称为不依赖空气推进。1930年,德国沃尔特(Walter)博士提出以过氧化氢做为燃料的动力机系统,经过数年的研究和试验,在二战末期,沃尔特发明了“沃尔特式动力机”,原理是通过燃烧过氧化氢推动内燃机工作,由于过氧化氢燃烧反应产生氧气,所以不需要额外空气,但是早期的沃尔特式动力机并不可靠,因为过氧化氢容易发生自燃反应,因此德国只生产几艘XVIIB,以过氧化氢为动力的潜艇。
第二次世界大战之后,许多国家开始研究其他可能的替代动力来源,以延长潜艇在水面下持续作业时间,采用柴油机与电力马达加上电瓶的搭配,在潜艇中携带氧化剂或者是其他不需要氧气助燃的设备,如此一来可以在水面下驱动柴油机进行充电,或者是由新的动力来源为电瓶充电与驱动电力马达。
尽管不依赖空气推进拥有大大提高了柴电动力潜艇的能力,但由于过氧化氢等氧化剂的稳定性差,使得不依赖空气推进的安全性常被质疑。实际上无论早期沃尔特试验还是二战后美国,苏联的深入研究,都出现了或多或少的事故以及问题。
现代不依赖空气推进装置类别主要为空气封闭柴油机、闭式循环汽轮机、斯特灵闭式动力机以及燃料电池等。4
武器系统 主要有弹道导弹、巡航导弹、反潜导弹、鱼雷、水雷武器及其控制系统和发射装置等。
主要有弹道导弹、巡航导弹、反潜导弹、鱼雷、水雷武器及其控制系统和发射装置等。
弹道导弹,是战略导弹潜艇的主要武器,用于攻击陆上重要目标,大多携带单个或分导式核弹头。1艘战略导弹潜艇装有弹道导弹12~24枚,如美国的俄亥俄级战略核潜艇,一次可携带三叉戟D5战略导弹24枚,每枚携带12个15万吨级分导式核弹头,一艘潜艇一次可以投掷288个核弹头,威力足以摧毁半个欧洲。
巡航导弹是战术核潜艇或者攻击型核潜艇的主战装备,有战术巡航导弹和战略巡航导弹。战术巡航导弹,主要用于攻击大、中型水面舰船;战略巡航导弹,主要用于攻击陆上目标。著名的有美国潜射战斧巡航导弹,射程450-2500公里。可用于反舰也可用于对岸核攻击。
潜射反舰导弹也是现代潜艇主战装备之一,用于攻击各种水面目标,可水下发射,射程远,精度高,但威力不如鱼雷。
反潜导弹,是一种火箭助飞的鱼雷或深水炸弹,有的采用核装药,主要用于攻击水下潜艇,是二战后逐渐兴起的一种武器,著名的有美国阿斯洛克反潜导弹。
鱼雷是潜艇的传统武器,除了极少数研究用潜艇和袖珍潜艇外,几乎所有潜艇都装备有鱼雷,主要用于对舰、对潜攻击。鱼雷是破坏舰艇水下结构的利器,命中1枚即可重创一艘驱逐舰,命中1-2枚可击沉或重创一艘万吨级商船,命中2-3枚可重创或击沉一艘万吨级巡洋舰。过去主要采用无制导的应用压缩空气的直航鱼雷,二战中纳粹德国和日本相继发明了电动鱼雷、声自导鱼雷和热动力鱼雷。现代潜艇主要装备533mm-650mm的重型反舰/反潜两用鱼雷。在攻击中段一般采用线导方式,末段采用声导、尾流自导等方式进行攻击。
潜艇使用的水雷,多为沉底水雷,主要布设在敌方基地、港口和航道,用于摧毁敌方舰船。武器控制系统多采用数字计算机,可同时计算跟踪多批目标,提供决策依据,求出最佳攻击目标的射击阵位,并计算出数个目标的射击诸元,实现武器射击指挥自动化。3
导航系统包括磁罗经、陀螺罗经、计程仪、测深仪、六分仪、航迹自绘仪,自动操舵仪和无线电、星光、卫星、惯性导航设备等。惯性导航系统能连续准确地提供潜艇在水下的艇位和航向、航速、纵横倾角等信息。“导航星”全球定位系统使用后,潜艇在海上瞬间定位精度达10米左右。
探测设备 主要有潜望镜、雷达、声呐以及雷达侦察告警接收机。潜艇在水下将潜望镜的镜头升出水面,可用目力观察海面、空中和海岸情况,测定目标的方位、距离和测算其运动要素。现代潜艇在潜望镜上安装有激光测距、热成像、微光夜视等传感器,具有夜间观察、照相和天体定位等功能(见潜艇潜望镜)。雷达,通过雷达升降天线能在水下一定深度测定目标的方位、距离和运动要素,保证潜艇航行安全和对水面舰船实施鱼雷或导弹攻击,雷达侦察告警接收机的天线采用专门的升降桅杆或寄生于其他升降装置上,保证潜艇在潜望镜航行状态时对敌方雷达的侦察告警。声呐是潜艇水下活动时的主要探测工具,有噪声声呐和回声声呐。噪声声呐能对舰船进行被动识别、跟踪、测向和测距;回声声呐能主动测定目标的方位、距离和运动要素。此外,还有探雷声呐、测冰声呐、识别声呐和声线轨迹仪等。3
通信设备 主要有短波、超短波收发信机,甚长波收信机,卫星通信和水声通信设备等。潜艇向岸上指挥所报告情况主要利用短波通信,接收岸上指挥所电讯主要用甚长波收信机,同其他舰艇、飞机或沿岸实施近距离通信联络主要利用超短波通信。潜艇可以利用升降天线在一定深度收信,若使用拖曳天线,能在较大深度收信。卫星通信,可使潜艇通过卫星与岸上指挥所实施通信,通信距离远。水声通信,用于同其他潜艇、水面舰艇的水下通信和识别。为保证通信的隐蔽性,潜艇一般采用单向通信方式,使用超快速通信系统,能使潜艇在极短的瞬间向岸上指挥所发信。
主要有短波、超短波收发信机,甚长波收信机,卫星通信和水声通信设备等。潜艇向岸上指挥所报告情况主要利用短波通信,接收岸上指挥所电讯主要用甚长波收信机,同其他舰艇、飞机或沿岸实施近距离通信联络主要利用超短波通信。潜艇可以利用升降天线在一定深度收信,若使用拖曳天线,能在较大深度收信。卫星通信,可使潜艇通过卫星与岸上指挥所实施通信,通信距离远。水声通信,用于同其他潜艇、水面舰艇的水下通信和识别。为保证通信的隐蔽性,潜艇一般采用单向通信方式,使用超快速通信系统,能使潜艇在极短的瞬间向岸上指挥所发信。
水声对抗设备 主要有侦察声呐和水声干扰器材等。侦察声呐,用于侦察目标主动声呐发出的声波信息及其技术参数。水声干扰器材主要有水声干扰器、水声诱饵(潜艇模拟器)和气幕弹,用于压制、迷惑、诱开敌方声呐的跟踪或声自导鱼雷的攻击。3
救生设备有失事浮标和单人救生器等。潜艇失事时,放出失事浮标以标志潜艇失事的位置,并与外界取得联系。单人救生器可供艇员通过鱼雷发射管、指挥室或专为脱险用的救生闸套离艇出水。在潜艇主压载水舱内还装有应急吹排水系统,潜艇失事时,可由潜艇或救生艇注入高压气体排出主压载水舱内的水,使潜艇浮出水面。3
居住生活设施包括空气再生、大气控制、放射性污染检测、温湿度调节系统、生活居住以及饮食、用水、照明、排泄、医疗等设施,用于保持艇内适宜的生存和活动环境,保障艇员健康。3
潜艇氧气来源潜艇艇员呼吸的氧气主要来自四个方面:通气管装置、空调装置、空气再生装置和空气净化装置。
通气管装置是一种可以升降的管子,在近海海域或夜间航行时,潜艇有时上浮至潜望镜深度,在距水面几米或十几米深的地方伸出潜望镜观察水面及空中敌情,如条件允许,可将通气管升出水面,空气经管子进入潜艇舱室,舱内污浊空气可通过设在指挥台围壳后部的排气管装置用抽风机排出,使艇内空气对流,可以保持新鲜空气。潜望镜深度在战术术语中称作危险深度,为了隐蔽起见,潜艇一般都不敢使用这种工作状态,因为它极易被敌反潜兵力发现,在近海还容易撞击或搅乱渔网等。
空调装置主要是保持艇内的温度、湿度等,使艇员有一个舒适的生活环境和工作条件,同时保证电子设备的正常工作,它本身并不能产生氧气。
空气再生装置是一种可以生成氧气的装置,它由再生风机、制氧装置、二氧化碳吸收装置等组成。工作时,风机将舱内污浊的空气经风管抽至二氧化碳吸收装置,消除二氧化碳,再在处理过的空气中加进由制氧装置产生的氧气,然后经风管送到各舱室供艇员呼吸,如此循环,以达空气再生的目的。这种空气再生装置通常还可用电解水来制氧,它分解出的氧气可供 70~100人呼吸数小时,但由于耗电过多,不适于常规潜艇。此外,还有一些预储氧气的方法,如再生药板、氧气瓶、液态氧和氧烛等。再生药板是一种由各种化学物质及填料制成的多孔板,空气流过时,就能产生化学反应,生成氧气。一般潜艇上带的再生药板,可使用500~1500小时。氧气瓶是将氧气储存起来的一种高压容器,使用时打开阀门即可放气,主要供潜水钟、深潜器等使用。液态氧也是一种与氧气瓶类似的高压容器,它可供 100 名艇员使用 90天。氧烛是一种由化学材料等制成的烛状可燃物,点燃后即可造氧。一根 1尺长、直径3 寸的氧烛所放出的氧气,可供40 人呼吸 1小时。
空气净化装置是将艇内空气中的有害气体和杂质控制在允许标准值以下的一种处理装置,常用的有以下四种:
一是消氢燃烧装置,它主要是用电加热器将流过的空气加温,然后在催化燃烧床的催化作用下使氢、氧发生化学反应而生成水蒸气,氢就被燃烧掉了。
二是有害气体燃烧装置,其工作方式与第一种基本相同,只不过它所燃烧掉的是有害气体。
三是二氧化碳净化装置,它通过一种特殊药液来吸收二氧化碳。
四是活性炭过滤器,它是用活性炭作滤料,是由特制的炭组成的多孔性吸附剂来吸收各种有害气体,进而达到净化空气的目的。3

 扫码下载APP
扫码下载APP
 科普中国APP
科普中国APP
 科普中国
科普中国
 科普中国
科普中国