

简介控制仿真利用地面仿真设备来研究飞行器控制系统动态性能的技术。仿真设备由计算机和各种物理仿真设备组成,它能模拟飞行器、控制系统和各种飞行环境。按照建立模型的性质,可把控制系统的仿真分为数学仿真、半物理仿真和全物理仿真三类。全物理仿真最为逼真,但在控制系统的研制过程中,三种仿真的作用是互相补充的。
这些设备不仅用来研究控制系统而且能用来训练飞行员和航天员。为了进行控制系统的仿真研究,需要建立仿真系统,这就首先要确定系统模型并用仿真计算机和各种仿真设备(如运动模拟器,目标模拟器和环境模拟器等)来具体实现这个模型。这样建成的仿真系统可以重复使用。仿真设备具有通用性,既便于使用又便于维修,比飞行试验的成本低得多,因而仿真是研究和设计控制系统的一种有效方法。
数学仿真也称计算机仿真,就是在计算机上实现描写系统物理过程的数学模型,并在这个模型上对系统进行定量的研究和实验。这种仿真方法常用于系统的方案设计阶段和某些不适合做实物仿真的场合(包括某些故障模式)。它的特点是重复性好、精度高、灵活性大、使用方便、成本较低、可以是实时的、也可以是非实时的。数学仿真的逼真度和精度取决于仿真计算机的精度和数学模型的正确性与精确性。
半物理仿真采用部分物理模型和部分数学模型的仿真。其中物理模型采用控制系统中的实物,系统本身的动态过程则采用数学模型。半物理仿真系统通常由满足实时性要求的仿真计算机、运动模拟器(一般采用三轴机械转台)、目标模拟器、控制台和部分实物组成。控制系统电子装置和敏感器安放在转台上。
半物理仿真的逼真度较高,所以常用来验证控制系统方案的正确性和可行性,进行故障模式的仿真以及对各研制阶段的控制系统进行闭路动态验收试验。此外,用航天仿真器来训练航天员和用飞行仿真器来训练飞行员也属于半物理仿真性质,后者更着重于视景模拟和人机关系。以仿真计算机实现系统模型和以航天器计算机或控制系统电子线路为实物的闭路试验,也可认为是半物理仿真,这种仿真重点在于检验控制计算机软件的正确性或研究控制方式中某些功能和参数。
半物理仿真的逼真度取决于接入的实物部件的多寡、仿真计算机的速度、精度和功能,转台和各目标模拟器的性能。通常对三轴机械转台的要求是精度高、转动范围大、动态响应快和框架布置不妨碍光学敏感器的视场。半物理仿真技术是现代控制系统仿真技术的发展重点。
全物理仿真全部采用物理模型的仿真,又称实物模拟。例如航天器的动态过程用气浮台(单轴或三轴)的运动来代替,控制系统采用实物。因为实物是安放在气浮台上的,这种方法很适合于研究具有角动量存贮装置的航天器姿态控制系统的三轴耦合,以及研究控制系统与其他分系统在力学上的动态关系。在对航天器姿态控制系统进行全物理仿真时,安装在气浮台上的实物应包括姿态敏感器(见航天器姿态敏感器)、控制器执行机构(见航天器姿态控制执行机构)和遥测遥控装置和有关的分系统。目标模拟器、环境模拟器和操作控制台均设置在地面上。航天器在空间的运动是由气浮台来模拟的,所以全物理仿真的逼真度和精度主要取决于气浮台的性能。对气浮台的要求是空气轴承的摩擦力矩和涡流力矩小,垂直负载能力和横向刚度大,气浮台动、静平衡好。全物理仿真技术复杂,一般只在必要时才采用。
非线性因素影响进行非线性效应影响的研究,以确定施工控制仿真分析系统。可能引起索塔非线性的 主要来源有三个方面:
梁柱效应主塔工作时处于压弯状态,引起了梁柱效应。用梁单元分析时,可用稳定函数表示的几 何非线性刚度矩阵或一般的几何刚度阵计入这一效应。
大位移效应由于索塔高达300.4 m,具有柔性结构特征,外荷载作用下结构变形可能较大,平衡方 程必须建立在变形后的位置上。可以用大位移刚度矩阵或基于CR列式的有限位移理论计 入这一效应。
混凝土的徐变特性混凝土的徐变特性研究涉及到徐变系数和计算方法。由于规范给出的徐变系数计算方 式以图形曲线及表格形式出现,不便于计算机分析,将其表达成适于电子计算机的公式,计算方法采用按龄期调整的有效弹性模量法,其t时刻的应力应变关系为
为按龄期调整的有效弹性模量,其中
为了比较索塔施工控制结构分析中非线性因素的影响程度,选择两个关键施工阶段进 行比较,模型1为中塔柱合拢前,模型2为索塔完工时。
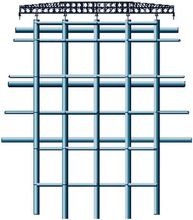
下横梁支架+贝雷架分析模型正立面图
(1)模型1——最大单悬臂
此模型考虑了中塔柱混凝土节段48、塔肢合拢前的情形(连接位)。分析时考虑支撑节段4~节段10 的影响。该模型见图。

(2)模型2——全塔模型
此模型考虑了索塔完成时的情形(安装混凝土节段68)。该模型见图。

通过对索塔进行非线性分析,得到如下结论:
a. 由于索塔为混凝土结构,刚度较大,施工过程中主要承受竖向荷载,因此几何非线性效应和梁柱 效应等对索塔施工过程中的结构内力和变形影响很小,施工控制仿真分析可不考虑这两种效应。
b.混凝土收缩徐变效应对索塔施工过程中的结构内力和变形影响很大,施工控制仿真 分析必须考虑这一效应。由于混凝土收缩徐变模式复杂,收缩徐变模式多,研究表明:经过 初步验证(在湿度较大时)采用JTG D62—2004规范规定模式更加符合实际混凝土结构的 变形。建议施工控制仿真分析中采用JTG D62—2004规范规定模式。
控制仿真平台软件设计机电设备控制仿真平台软件设计同样包含上位机和下位机软件设计。1
上位机机电设备仿真界面设计上位机机电设备仿真界面采用工业组态软件MCUS来完成。利用MCUS的设备窗口完成上位机与下位机通信设置、数据和命令交换。在MCUS的用户窗口,采用图形对象、图元对象、图符对象实现机电设备的仿真界面设计,经变量连接,可以完成机电设备的仿真运行。在MCUS的实时数据库可以设置机电设备的变量;在运行策略里进行脚本程序的编写。
下位机嵌入式控制器软件设计下位机采用Keil MDK C语言进行设计,主要实现上下位机的变量数据交换,从而在下位机嵌入式控制器的IO口端子通过高低电平(开关量和模拟量)表现其工作状态。具体包括2部分的内容。
(1)通信模块。通信模块包括3部分:
①与上位机触摸屏或PC机基于MODBUS通信协议的通信程序,所编写的通信程序能够完成MODBUS常用的功能命令,也可根据需要进行添加;
②与级联的控制模块相连的通信程序(为了统一起见,也采用MODBUS协议完成控制板级联程序),主控制器为主,其他级联模块为从;
③第2路RS485作为自由口,以备与其他通信协议的模块相连,例如可用作读取伺服驱动器内部寄存器。
(2)数据交换模块。数据交换模块负责解释触摸屏或PC机上虚拟机电设备的命令和数据,与下位机控制的变量实现连接,然后将对应的输入输出数据表现在下位机控制器的IO端口上。
我国在世界首创三飞行器控制仿真系统据有关专家介绍,航空兵空战战术训练从天空走进仿真系统,是当今世界科学练兵,经济练兵的方向。在实现了飞行技术模拟训练以后,各发达国家便开始攻克战术训练仿真系统。但由于目标机、攻击机、空——空导弹共存于同一系统的技术复杂,难度极大而久攻未克,目前战术训练处于地面演练和空中打枪靶阶段,经济代价高,危险性大。1986年全军下达了这一重点课题后,一航院迅速组织了多学科、多专业结合的攻关队伍,经6年艰苦攻关,突破了一系列重大难关,研制成功了三飞行器控制仿真系统。该系统于1992年11月13日通过空军鉴定。军内外专家认为,这一系统在世界上首次将目标机、攻击机和导弹等空战三要素共溶于同一仿真系统中,整体技术达到国际90年代先进水平。经中国科学技术情报研究所对美、英、法、日、前苏联等国仿真研究资料进行联机检索,表明我国此项研究成果属世界首创。

 扫码下载APP
扫码下载APP
 科普中国APP
科普中国APP
 科普中国
科普中国
 科普中国
科普中国