

在多传感器融合理论中,一般研究的是同步数据融合,即假设各传感器同步对目标进行测量,并且同步传送到融合中心。而实际过程中,传感器系统存在不同观测时间和数据传输延迟,人们将传感器系统分为同步传感器系统(SSTF)和异步传感器系统(ASTF)。在同步传感器系统中,对来自不同传感器的数据进行融合和噪声平滑再送往融合中心,在异步多传感器系统中,需要将不同时刻的数据统一到融合中心同一时刻上,再对量测数据进行优化、融合。1利用信息互补,通过数据融合技术,可以给出对目标位置的精确估计,改善对目标的跟踪和识别。
算法概述对异步传感器数据融合的方法主要有Alouani提出的基于量测和模型噪声相互独立的最优异步融合算法,Blair的最小二乘数据压缩法以及异步航迹融合方法等。Alouani算法复杂,不容易工程实现,Blair模型需要大量数据,无法满足实时、在线计算的要求,引用同步最优融合的加权方法,未构成误差协方差迹最小的异步融合。并且,目前异步融合最主要的局限性在于各种算法都只能适用于两两传感器之间的异步融合,对来自于多个传感器的异步数据无法进行有效处理。1
关键技术雷达和红外传感器是当前最常用的两类主/被动探测手段。雷达可以获得目标的完整位置信息,具有较好的测距、测速性能;红外传感器可以提供高精度的目标角度信息和强的目标识别能力。
异类传感器数据融合的关键是进行异类传感器的数据关联,即确定主被动传感器建立的航迹是否源于同一个目标。由于两类传感器的工作机理不同,使得在异类传感器数据关联中存在以下问题:①主被动传感器的数据率往往不一致,数据存在异步性。②红外传感器仅有角度测量而没有距离测量。③两类传感器的测角精度相差较大,数据冗余度大。
对于雷达和红外数据融合,既可采用基于测量的集中式融合跟踪,也可采用分布式处理方法,即首先由雷达和红外各自建立关于目标的航迹,然后再进行雷达与红外航迹的关联和融合。从理论上讲,基于测量的融合可以得到关于目标状态的最优估计,分布式处理是次优的。2
多传感器异步数据融合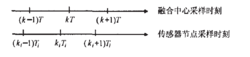 融合中心的采样间隔T和相应的离散时间标记k不同于传感器节点的采样间隔Ti和相应的离散时间标记ki,如图所示。
融合中心的采样间隔T和相应的离散时间标记k不同于传感器节点的采样间隔Ti和相应的离散时间标记ki,如图所示。
离散化后各传感器的滤波方程为



 我们可以假设融合中心的状态估计值可以由各传感器节点的状态估计值的线性组合来表示:
我们可以假设融合中心的状态估计值可以由各传感器节点的状态估计值的线性组合来表示:

对等式两边求期望:

记误差 的方差阵为Pf(k),则其估计为:
的方差阵为Pf(k),则其估计为:

假设传感器之间相互独立,根据协方差矩阵迹最小原则有下式成立:

对于两两配准的传感器,在下一式成立:

令


则有


对于多传感器系统,假设有n个传感器,设Ln为未知系数(注意无偏条件),有n=N时

 ...
...
 由于各传感器的误差协方差阵为对称阵,在实际运算中可有
由于各传感器的误差协方差阵为对称阵,在实际运算中可有
对于同步模式下多传感器融合系统来说,应该有
同理,对于异步模式下多传感器融合系统则有

雷达和红外数据融合是典型的异类传感器数据融合,把雷达和红外传感器组合使用构成雷达/红外多传感器系统,能够使系统降低对敌方干扰的脆弱性,提高系统可靠性;利用雷达高精度的距离测量和红外传感器高精度的角度测量,利用信息互补,通过数据融合技术,可以给出对目标位置的精确估计,改善对目标的跟踪以及提高系统的生存能力,因而引起了广泛的注意。
在集中融合系统框架下,首先采用最小二乘法对测量数据实现同步化处理,接着利用角度信息进行主被动传感器数据关联,最后根据各自的测角精度,对红外与雷达角度数据赋予不同的权值,压缩处理后得到相关融合后的角度信息,结合雷达距离信息作为最终的融合结果。
以雷达、红外的多传感器目标跟踪为技术特征的异步数据融合研究,利用最小二乘法将异步数据同步化,提出了基于相似性测度分析的数据关联算法,采用了基于测角精度的目标状态信息压缩算法。与最近邻航迹关联算法相比,相似性测度法的正确关联概率要改善20%,数据处理量和存储量都不大,便于应用。数学分析认为,航迹融合后的目标状态数据精度不低于单个探测器的数据精度。仿真研究表明,融合红外搜索跟踪装置所产生的目标航迹信息后,雷达的角跟踪精度得到了大幅度改善,这对于目标跟踪误差的减小具有重要的意义。2

 扫码下载APP
扫码下载APP
 科普中国APP
科普中国APP
 科普中国
科普中国
 科普中国
科普中国