

简介
数字闭环控制方案将开环检测误差信号作为反馈信号,使系统总是工作在线性度很高,斜率最大的零位点上,从而提供了很高的灵敏度和更大的动态范围。1同时采用数字化的信号处理方法,大大消除了采用模拟电路而带来的电路噪声而且很好的解决了模拟相位斜波斜波反馈的回扫时间问题。
数字闭环控制部分的主要功能是对干涉信号进行采样与A/D转换,数字解调,生成数字阶梯波反馈和方波调制信号,D/A转换,通过集成光学器件进行相位调制。数字闭环控制结构是在模拟相位斜波反馈的基础上加以数字化的改进而产生的。它采用方波作为相位偏置调制信号,以数字的阶梯波代替模拟相位斜波作为闭环反馈控制量,产生一个非互易相位移信号,来抵消有转动而产生的Sagnac相位移,从而使闭环控制系统达到动态平衡。2
反馈控制系统简介定义反馈控制系统是基于反馈原理建立的自动控制系统。所谓反馈原理,就是根据系统输出变化的信息来进行控制,即通过比较系统行为(输出)与期望行为之间的偏差,并消除偏差以获得预期的系统性能。在反馈控制系统中,既存在由输入到输出的信号前向通路,也包含从输出端到输入端的信号反馈通路,两者组成一个闭合的回路。因此,反馈控制系统又称为闭环控制系统。反馈控制是自动控制的主要形式。
同开环控制系统相比,闭环控制具有一系列优点。但反馈回路的引入增加了系统的复杂性,而且增益选择不当时会引起系统的不稳定。为提高控制精度,在扰动变量可以测量时,也常同时采用按扰动的控制(即前馈控制)作为反馈控制的补充而构成复合控制系统。3
组成反馈控制系统由控制器、受控对象和反馈通路组成。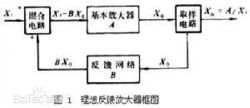
图中带叉号的圆圈为比较环节,用来将输入与输出相减,给出偏差信号。这一环节在具体系统中可能与控制器一起统称为调节器。以炉温控制为例,受控对象为炉子;输出变量为实际的炉子温度;输入变量为给定常值温度,一般用电压表示。炉温用热电偶测量,代表炉温的热电动势与给定电压相比较,两者的差值电压经过功率放大后用来驱动相应的执行机构进行控制。3
分类反馈控制系统包括:
(一)负反馈(negativefeed back):凡反馈信息的作用与控制信息的作用方向相反,对控制部分的活动起制约或纠正作用的,称为负反馈。
1.意义:维持稳态
2.缺点:滞后、波动
(二)正反馈(positivefeed back):凡反馈信息的作用与控制信息的作用方向相同,对控制部分的活动起增强作用的,称为正反馈意义:加速生理过程,使机体活动发挥最大效应。
反馈控制系统由控制器、受控对象和反馈通路组成。在反馈控制系统中,不管出于什么原因(外部扰动或系统内部变化),只要被控制量偏离规定值,就会产生相应的控制作用去消除偏差。因此,它具有抑制干扰的能力,对元件特性变化不敏感,并能改善系统的响应特性。
数字闭环控制电路数字闭环控制部分是整个系统的关键部分。
数字解调在数字闭环反馈回路中,数字解调部分的功能主要是通过数字运算的方法来获得开环输出信号。在使用模拟的解调方式来取得闭环的反馈信号的方案,难以实现160dB的光纤陀螺动态范围,这是因为模拟解调电路和A/D转换器存在着固有的偏置漂移。要消除这种偏移的影响,需要在设计中进行建模和补偿,这样势必会增加硬件电路及软件设计的复杂程度,从而导致成本较高而可靠性降低。
采用数字解调的方法可以很好的克服这一问题。由于在数字闭环控制系统设计中使用了方波偏置调制,因此转动引起的Sagnac相为移信息可以通过方波正负半周期光电检测器输出相减而获得,而且由于干涉信号通过A/D转换器变为数字形式,使得闭环的误差信号检测十分的简单和方便。
数字解调在本质上与电路的长期漂移是无关的,这是由数字解调特点所决定的。由于解调的周期与方波周期相等,如果采用1000米的光纤绕制光纤环,这个周期的大小为109s,是一个比较短的时间量,而偏移漂移是一变化缓慢的模拟量,通过前后两个半周期的采样值相减,叠加在输出信号上偏移量就被抵消掉了。数字解调的方法,原理简单,实现起来也十分方便,通过这种方法可以消除模拟信号偏移漂移,为反馈阶梯波的生成提供了一个比较精确的陀螺开环输出误差信号,是实现数字闭环反馈控制的基础。2
数字阶梯波反馈数字阶梯波反馈方案的提出,从根本上解决了模拟相位斜波回扫时间问题,大大提高了相位调制的性能。与方波调制的原理一样,阶梯波也是分时作用在两束光波上。
阶梯波反馈回路数字部分主要由解调器和两个串联的累加器组成。第一个累加器的作用是将通过数字解而调得到的控制误差信号累加,来产生阶梯波的每个小阶梯带阶高度值;第二个累加器则是将小阶梯的高度值每隔一个f时间周期累加一次来生成数字阶梯波反馈信号。
上述两个用于产生阶梯波信号的累加器在结构上都是由一个加法器和一个若干位数的寄存器组成。在设计中需要注意的一点是:第一个累加器的寄存器位数应足够宽,以避免在误差量积分过程中产生寄存器溢出。2
闭环调制增益控制在闭环回路使用阶梯波调制,解决了模拟斜波回扫时问的问题,同时采用数字解调的方法也消除了光纤检测电路的长期漂移,进而提高了性能。但是,这种单闭环控制方案也还是存在着的缺陷。
在数字闭环控制系统中,数字阶梯波反馈量必须通过D/A转换和放大电路转换成对应的模拟电压信号,并最终通过Y波导调制器作用于干涉光来产生补偿相移。而Y波导调制器的调制系数受环境因素影响较大,特别是当环境温度发生变化时Y波导的主要特性参数半波电压也会随之发生变化。由于这一器件的非理想特性而带来的调制增益漂移,限制了精度和应用环境范围。因此,为了克服温度因素带来的不利影响,有必要在现有的数字闭环控制系统上作一定的改进,从而使系统能够自动跟踪和补偿温度变化所带来的误差,提高稳定性和精度。2
双闭环控制系统采用四状态偏置调制来进行控制系统的调制解调,可以很方便的实现双数字闭环控制。在闭环的一个调制解调周期,可以同时获得由转动引起的误差和由闭环调制增益波动引起的误差,利用这两个误差信号就可以分别建立数字阶梯波反馈回路和调制增益控制回路的双闭环控制系统。
采用四态偏置的信号检测系统,它的每个调制解调周期可以均分为四个小的周期,假如对于1000m长的光纤环来说,每个小周期的时间为2.5us,那么只要分别对这四个周期内的干涉输出进行采样求和,然后再按照一定的顺序进行采样值的加减运算就可以分别实现转动误差信号和调制增益误差信号的数字解调。
将上面得到的两个误差信号分别进行数字积分以后,作为反馈控制信号可以分别建立数字阶梯波反馈回路和调制增益闭环控制回路,如图所示。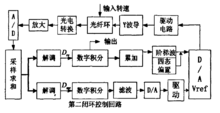

 扫码下载APP
扫码下载APP
 科普中国APP
科普中国APP
 科普中国
科普中国
 科普中国
科普中国