

名词解释
欠驱动系统是指系统的独立控制变量个数小于系统自由度个数的一类非线性系统,在节约能量、降低造价、减轻重量、增强系统灵活度等方面都较完全驱动系统优越。欠驱动系统结构简单,便于进行整体的动力学分析和试验。同时由于系统的高度非线性、参数摄动、多目标控制要求及控制量受限等原因,欠驱动系统又足够复杂,便于研究和验证各种算法的有效性。
典型的欠驱动系统桥式吊车、倒立摆系统、垂直起降飞行器、柔性机械手等都是典型的欠驱动系统。
倒立摆系统取一级倒立摆小车质量为 ,摆的质量为
,摆的质量为 ,小车的位置为
,小车的位置为 ,摆的角度为
,摆的角度为 ,动力学方程为
,动力学方程为

 式中,
式中, ,
, ,
, 为摆的长度,
为摆的长度, 为重力加速度。
为重力加速度。
针对倒立摆模型,取控制变量为4个,即单级倒立摆的摆角 、摆速
、摆速 、小车位置
、小车位置 和小车速度
和小车速度 。控制的目标是通过给小车底座施加一个力
。控制的目标是通过给小车底座施加一个力 ,使小车停留在零位置,并使杆不倒下。倒立摆系统的控制问题一直是控制研究中的一个典型问题。
,使小车停留在零位置,并使杆不倒下。倒立摆系统的控制问题一直是控制研究中的一个典型问题。
垂直起降飞行器垂直起降飞行器一般指战斗机或轰炸机。该飞行器可实现飞行器自由起落,从而突破跑道的限制,具有重要的军用价值。其动力学模型为1
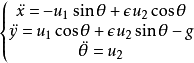 其中,
其中, 为飞行器质心的位置和滚动角度,
为飞行器质心的位置和滚动角度, 为飞行器底部推动控制输入和滚动控制输入,
为飞行器底部推动控制输入和滚动控制输入, 为重力加速度,
为重力加速度, 是描述滚动控制输入和横向控制输入之间关系的系数,系统输出为。该系统具有三个自由度,两个控制输入,是一个典型的欠驱动系统。
是描述滚动控制输入和横向控制输入之间关系的系数,系统输出为。该系统具有三个自由度,两个控制输入,是一个典型的欠驱动系统。
柔性机械手柔性关节机器人动力学模型可表示为2
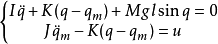
其中, 分别表示连杆和转子的角位置,
分别表示连杆和转子的角位置, 分别表示连杆和转子的转动惯量,
分别表示连杆和转子的转动惯量, 代表关节刚度系数,
代表关节刚度系数, 分别为连杆质量、重力加速度和连杆重心至关节长度,
分别为连杆质量、重力加速度和连杆重心至关节长度, 表示电机转矩输入。
表示电机转矩输入。

 扫码下载APP
扫码下载APP
 科普中国APP
科普中国APP
 科普中国
科普中国
 科普中国
科普中国